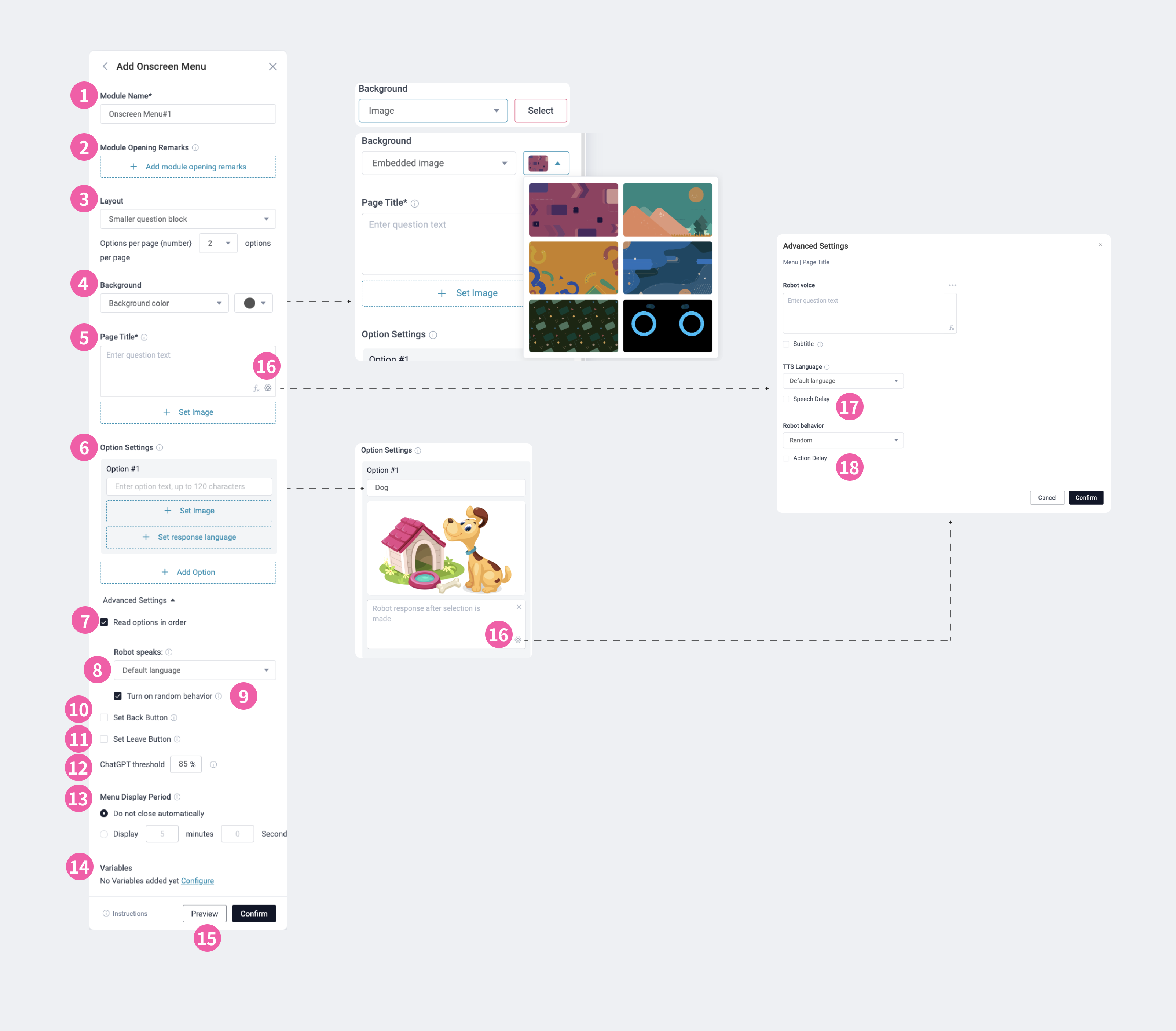
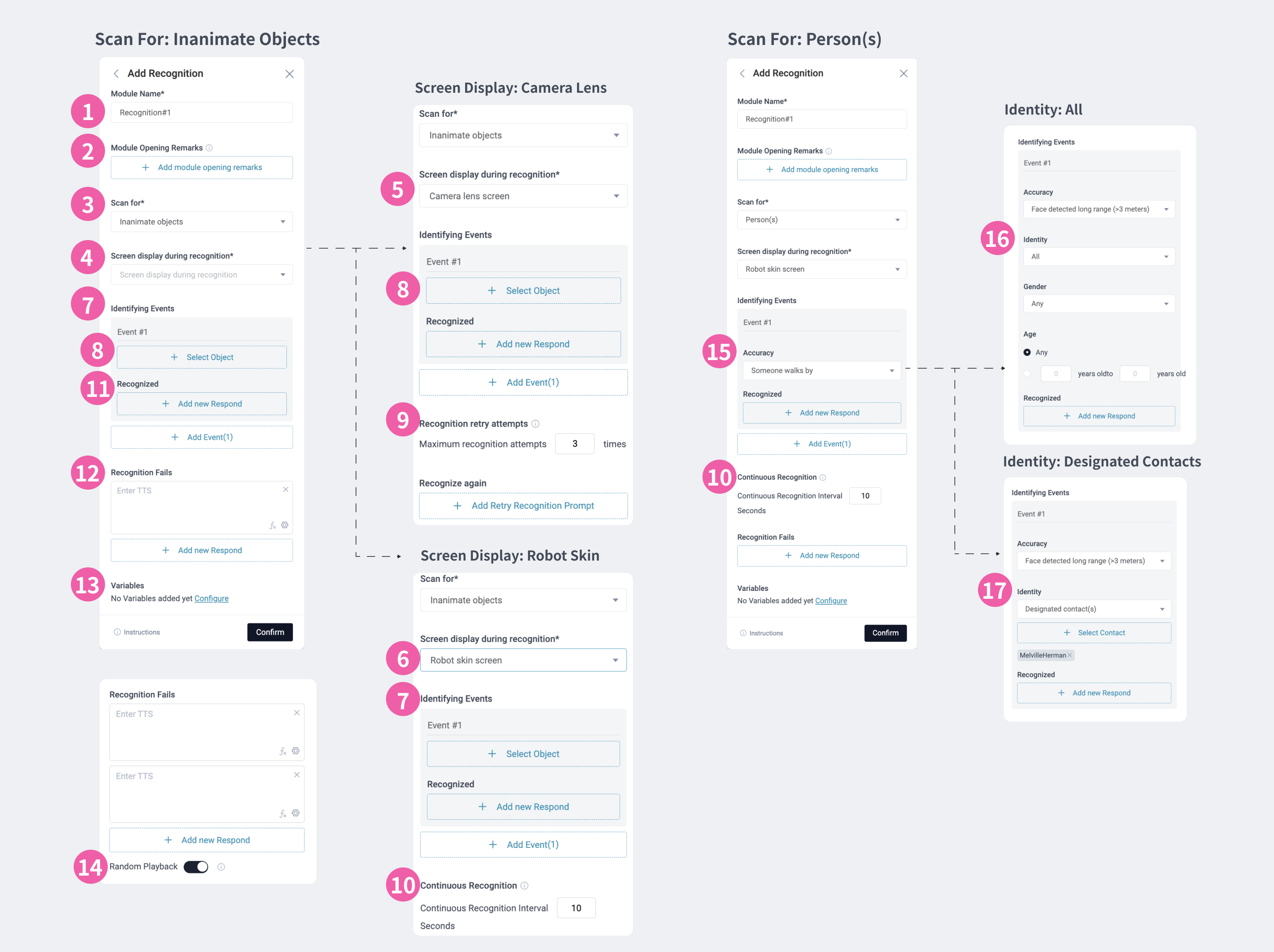
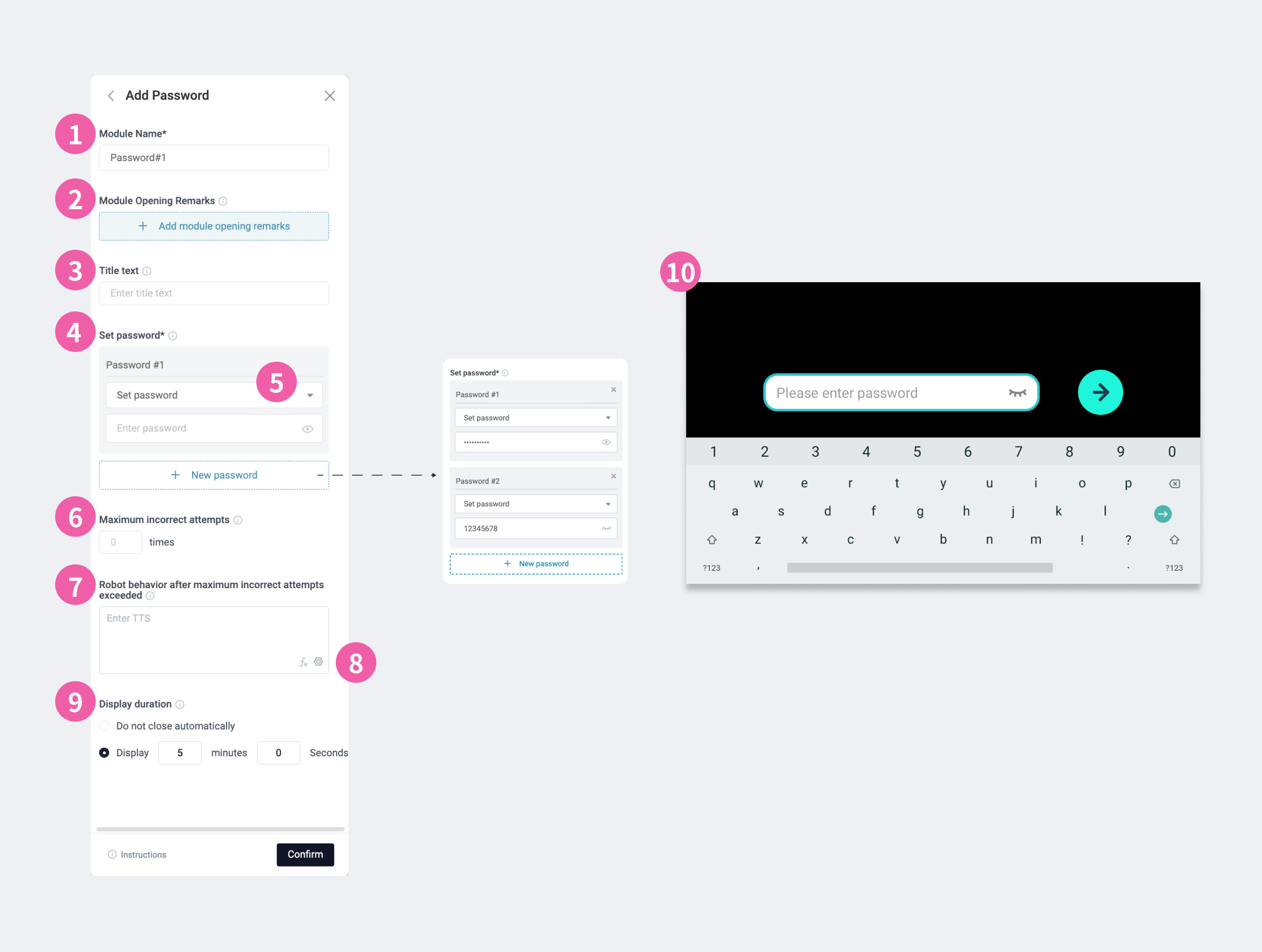
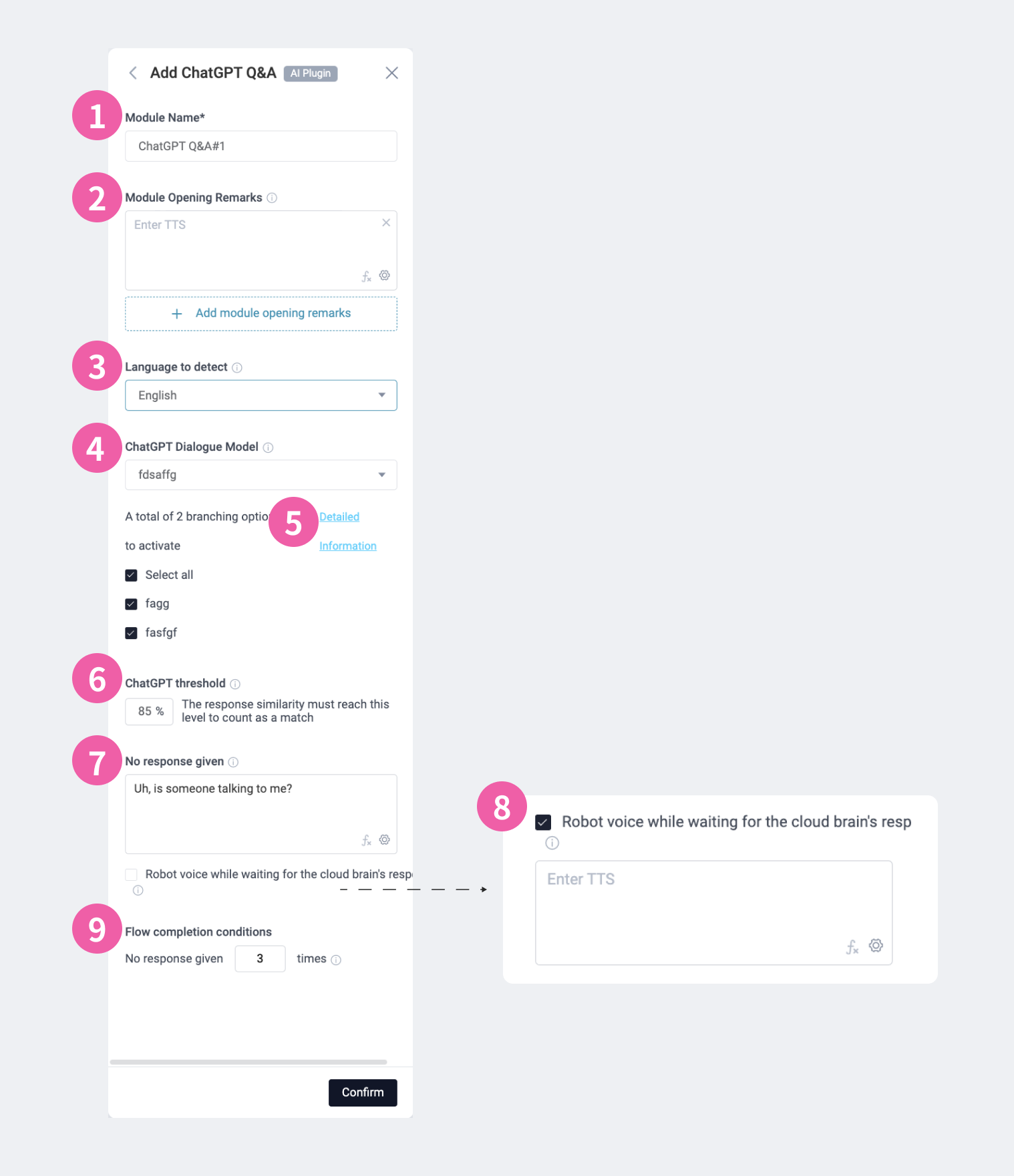
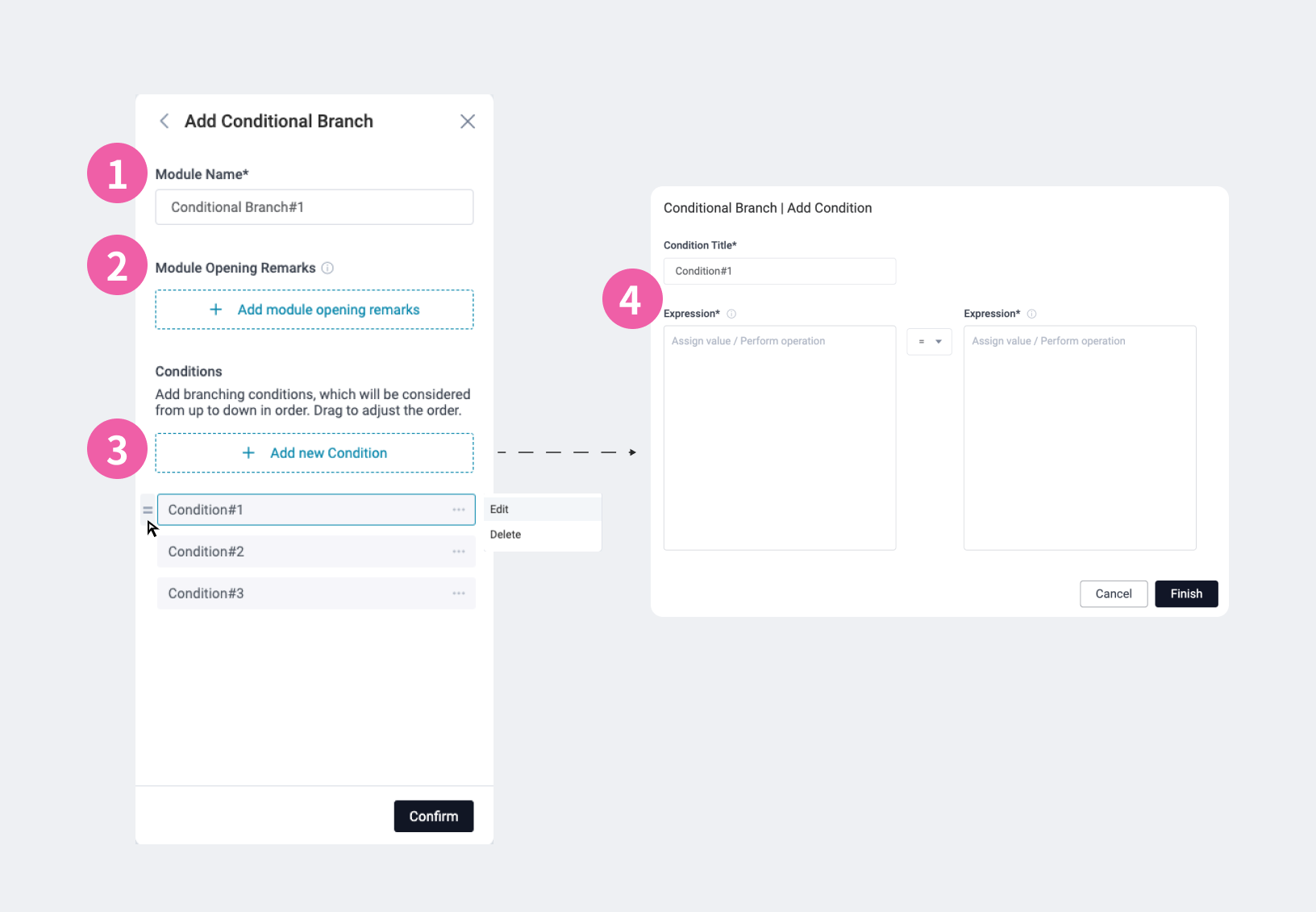
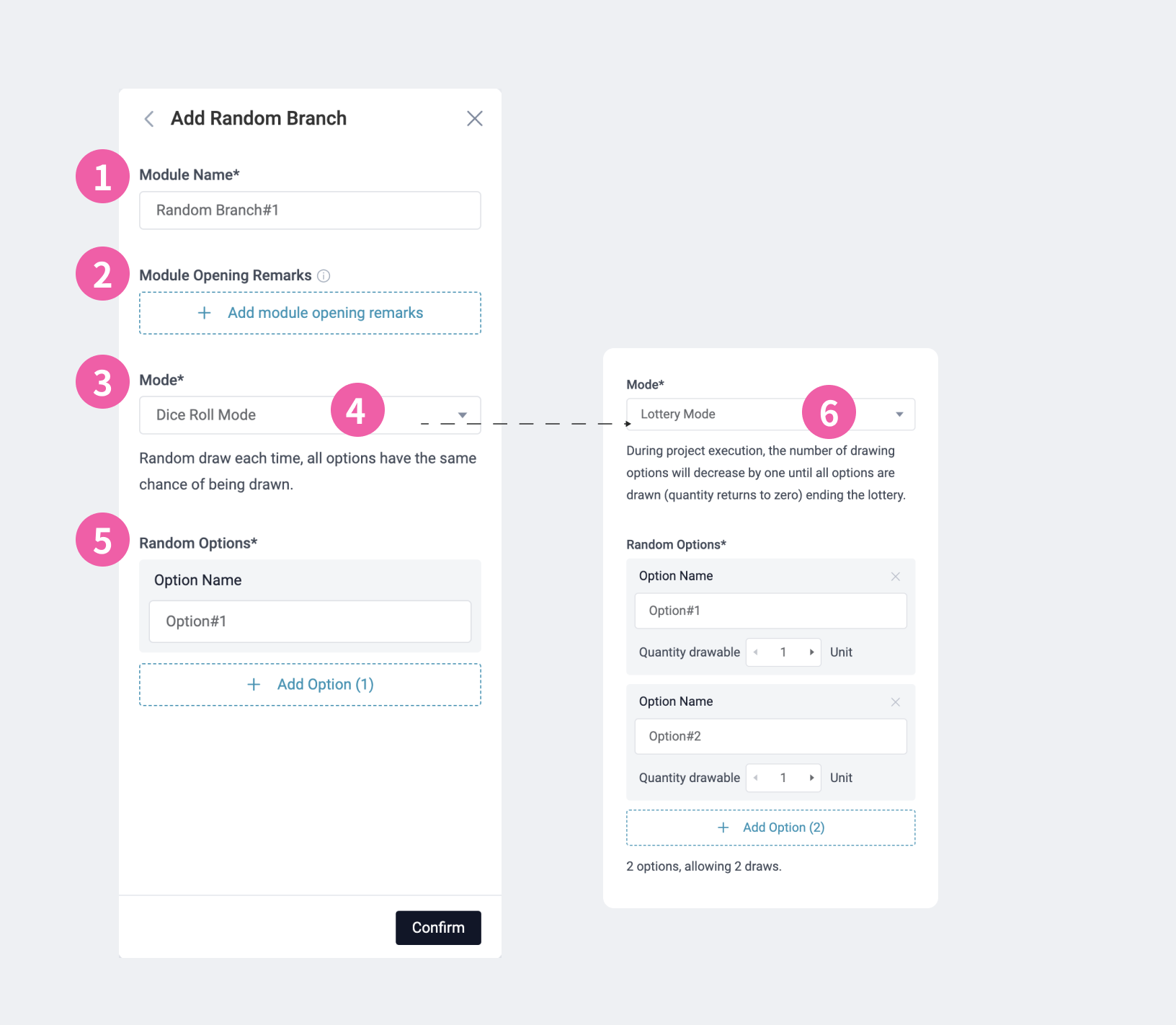
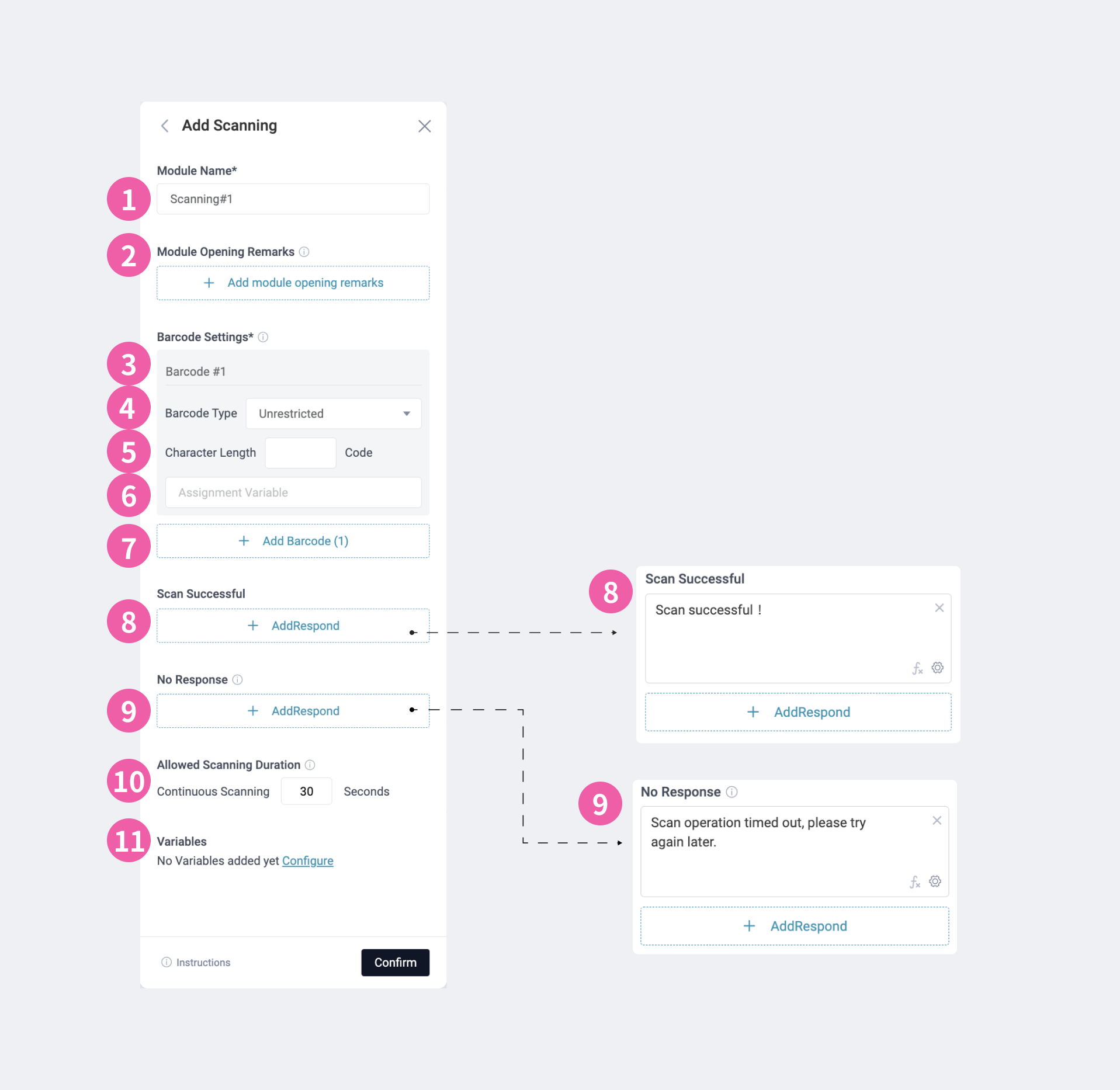
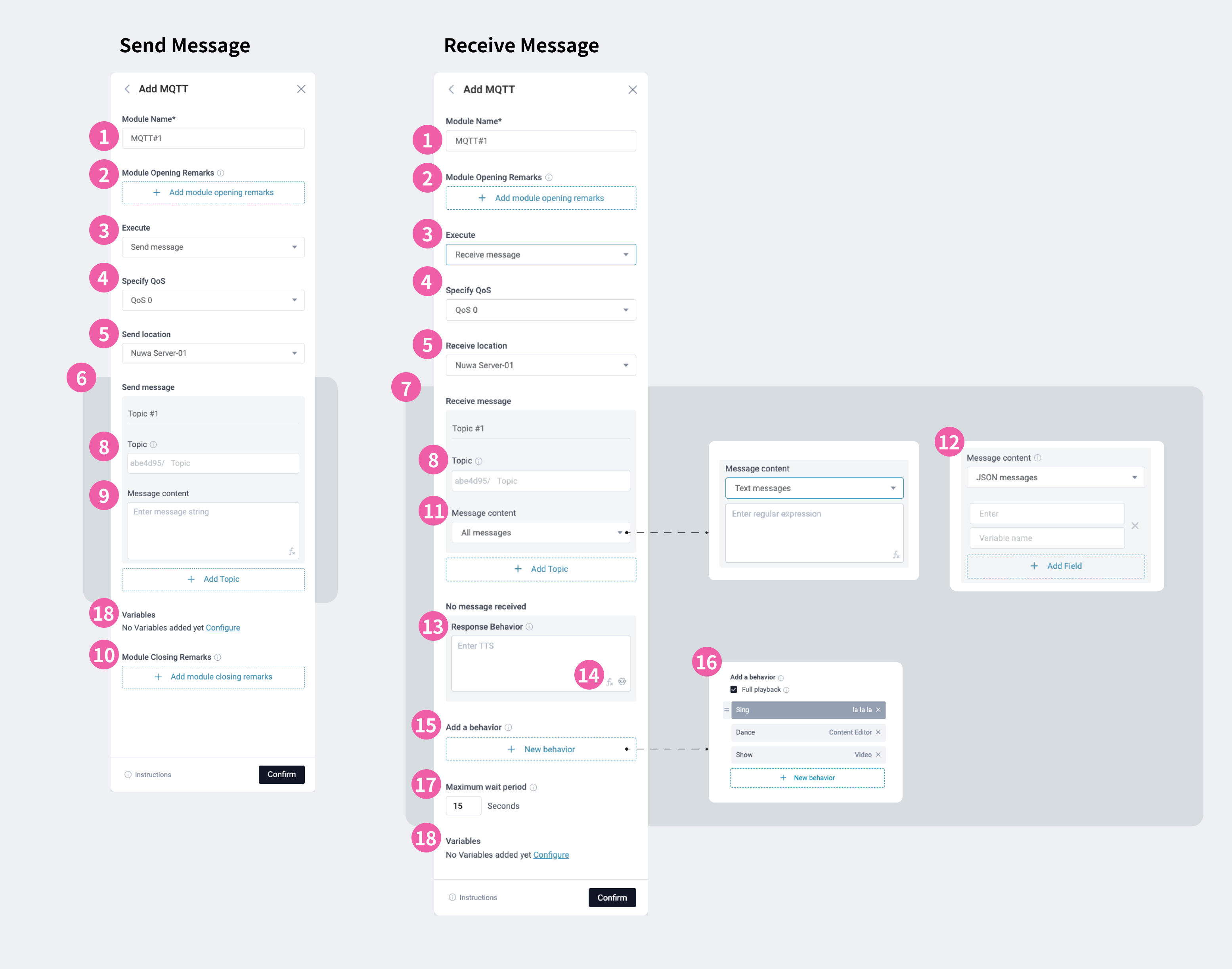
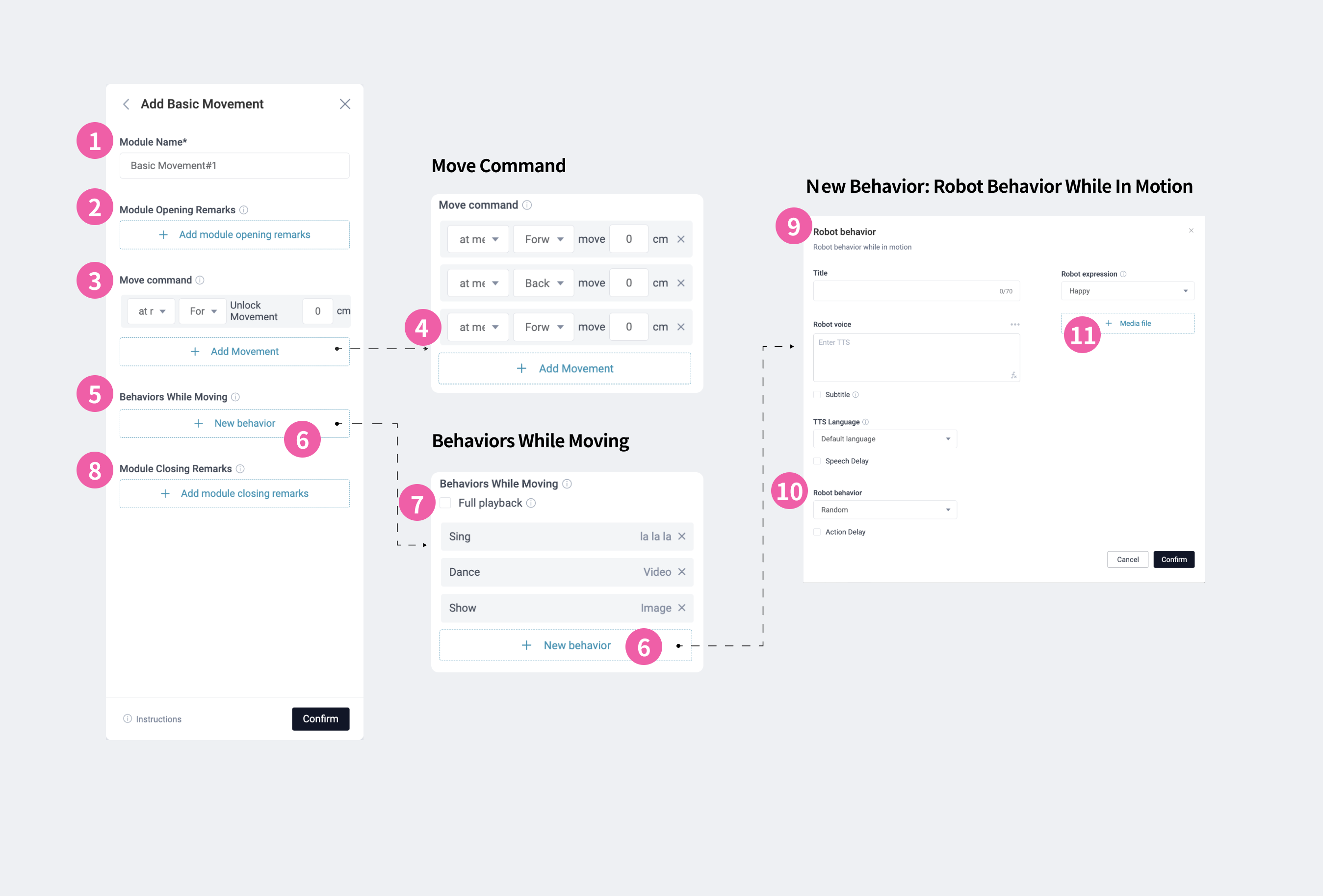
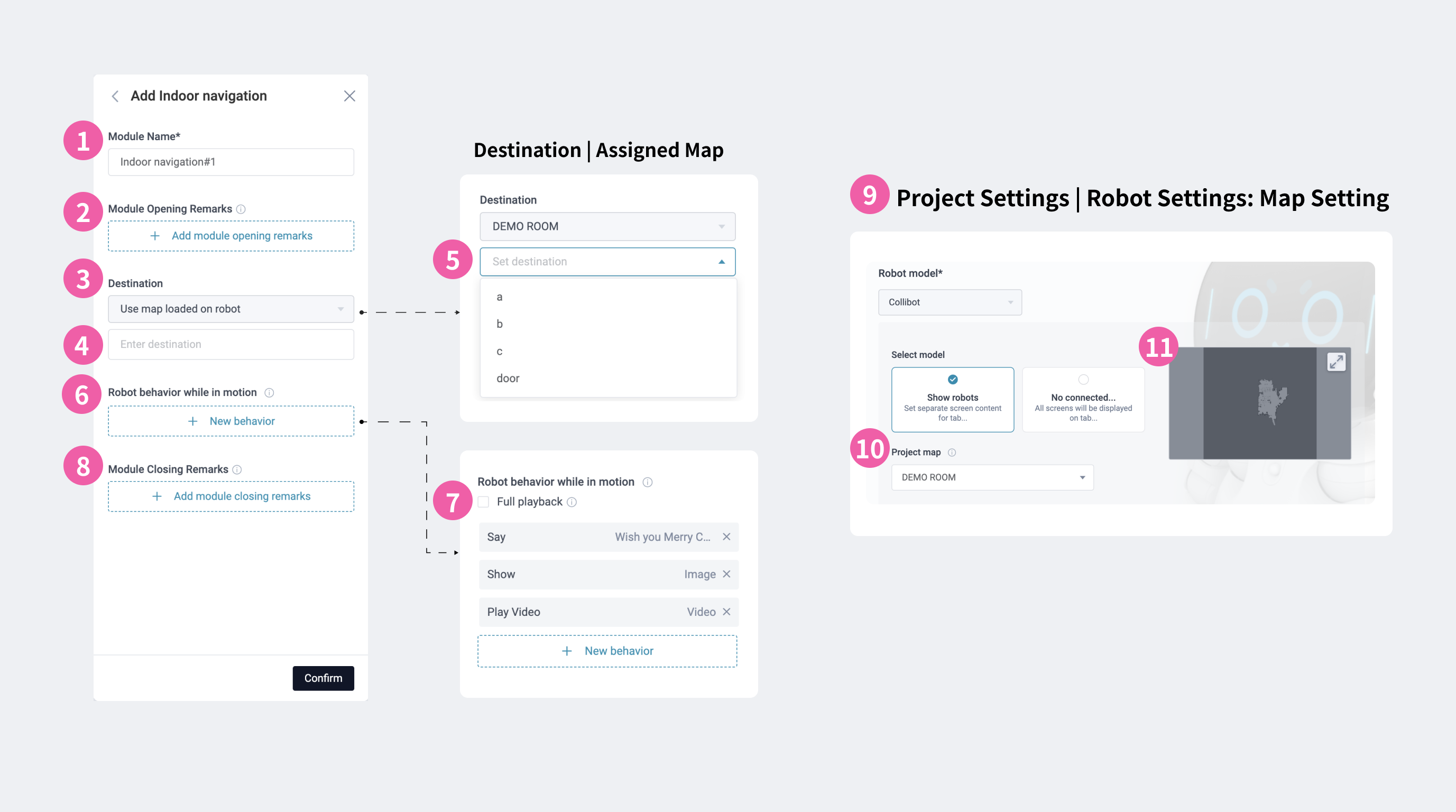
① Module Name: Displayed on the module card; customizable for easy identification.
② Module Opening Remarks: Set one or more Module Opening Remarks for the robot to say sequentially.
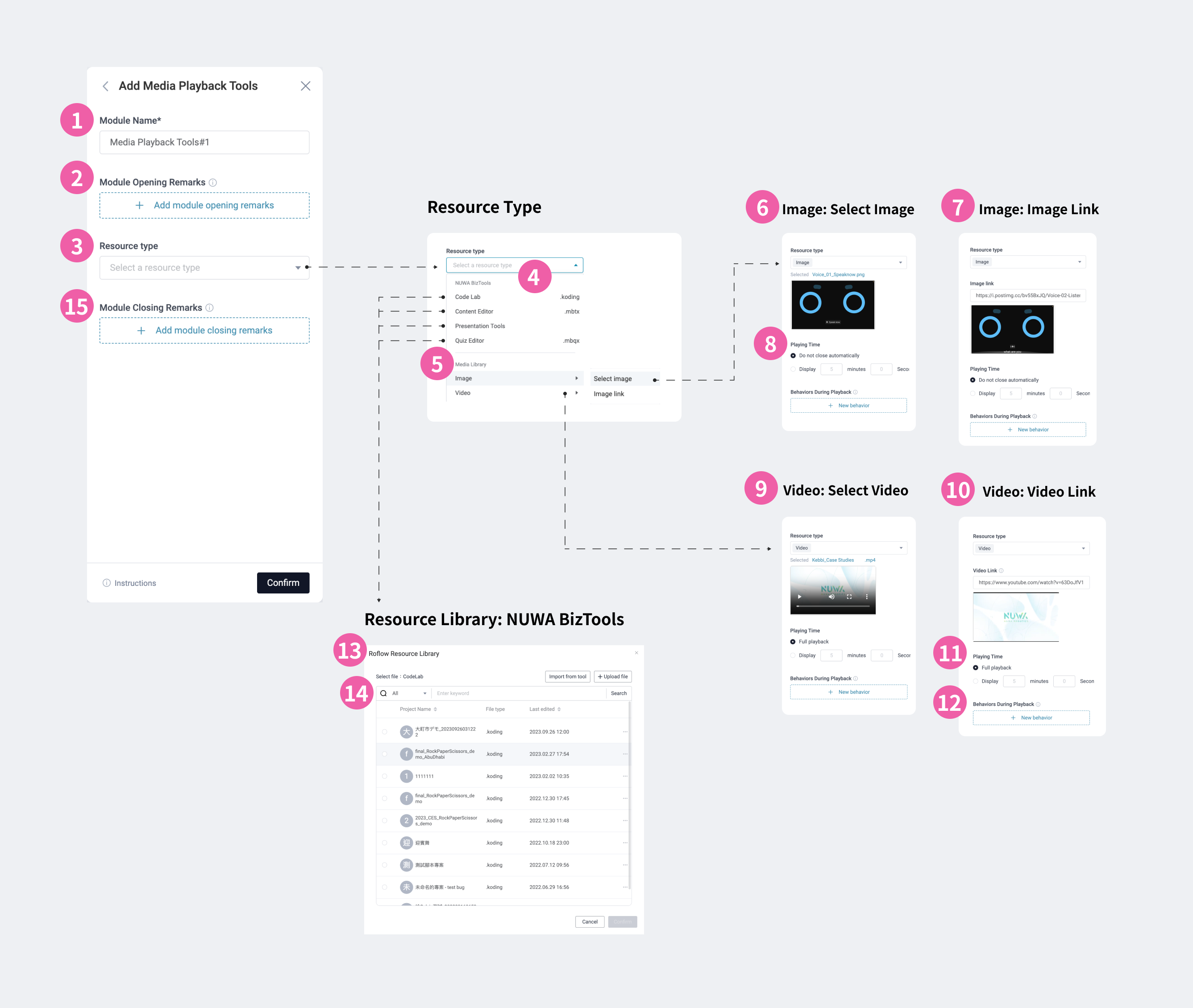
③ Layout: Select the display ratio of questions/options and the number of options per page.
④ Background: Select a solid color or an image for the background.
⑤ Page Title: Set question text, images, or Advanced Settings ⑯.
⑥ Option Settings: Configure option text, images, reply speech*, or Advanced Settings ⑯. A maximum of 20 options can be set.
*Response Speech: The robot delivers a speech or behavior upon selecting the option.
⑦ Read Options in order: Enables the robot to read each option for auditory interaction. Configure Robot Speaking Language ⑧ and Turn on Random Behavior ⑨.
⑧ Robot Speaking Language: Choose the default language or select one language (Traditional Chinese, Simplified Chinese, English, Japanese, Korean, or Spanish [U.S.]) The supported language will align with the languages available on the robot.
⑨ Turn on Random Behavior: The robot performs random actions as options are displayed.
⑩ Set Back Button: Adds a back button on the robot’s menu to return to the previous flow.
⑪ Set Leave Button: Adds a leave button on the robot’s menu to define the flow after exiting.
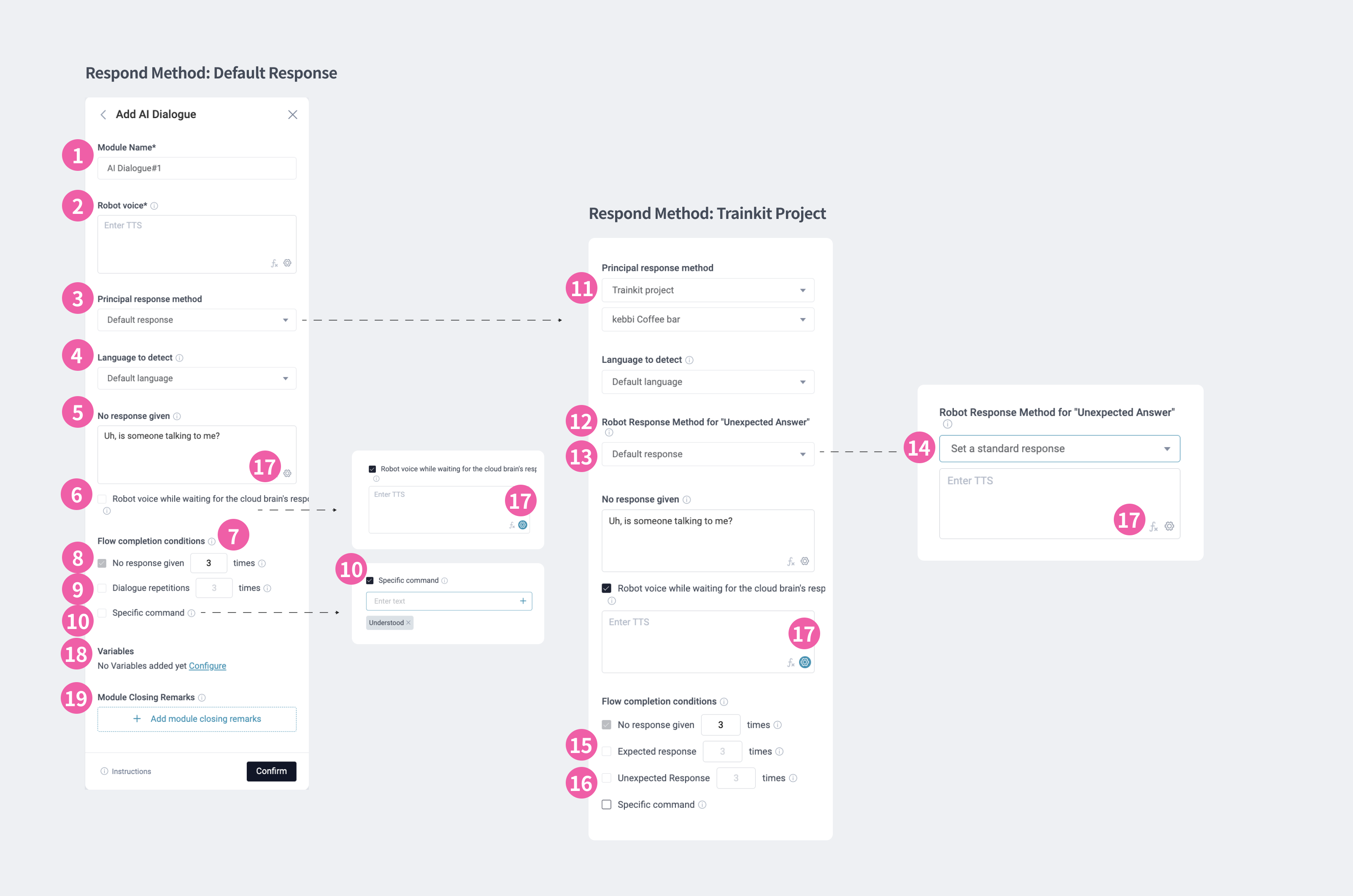
⑫ ChatGPT Threshold: Customize the similarity threshold (0–100%). Lower thresholds allow broader intent matches, while higher thresholds require more exact matches.
💡 An active AI service (KebbiGPT subscription) is required to use this feature.
⑬ Menu Display Period: Set how long the menu is displayed before auto-closing. After this duration, the robot will enter the “No Response” branch flow.
⑭ Variables: Add variables to this module.
⑮ Preview: View how the menu will appear on the robot’s screen.
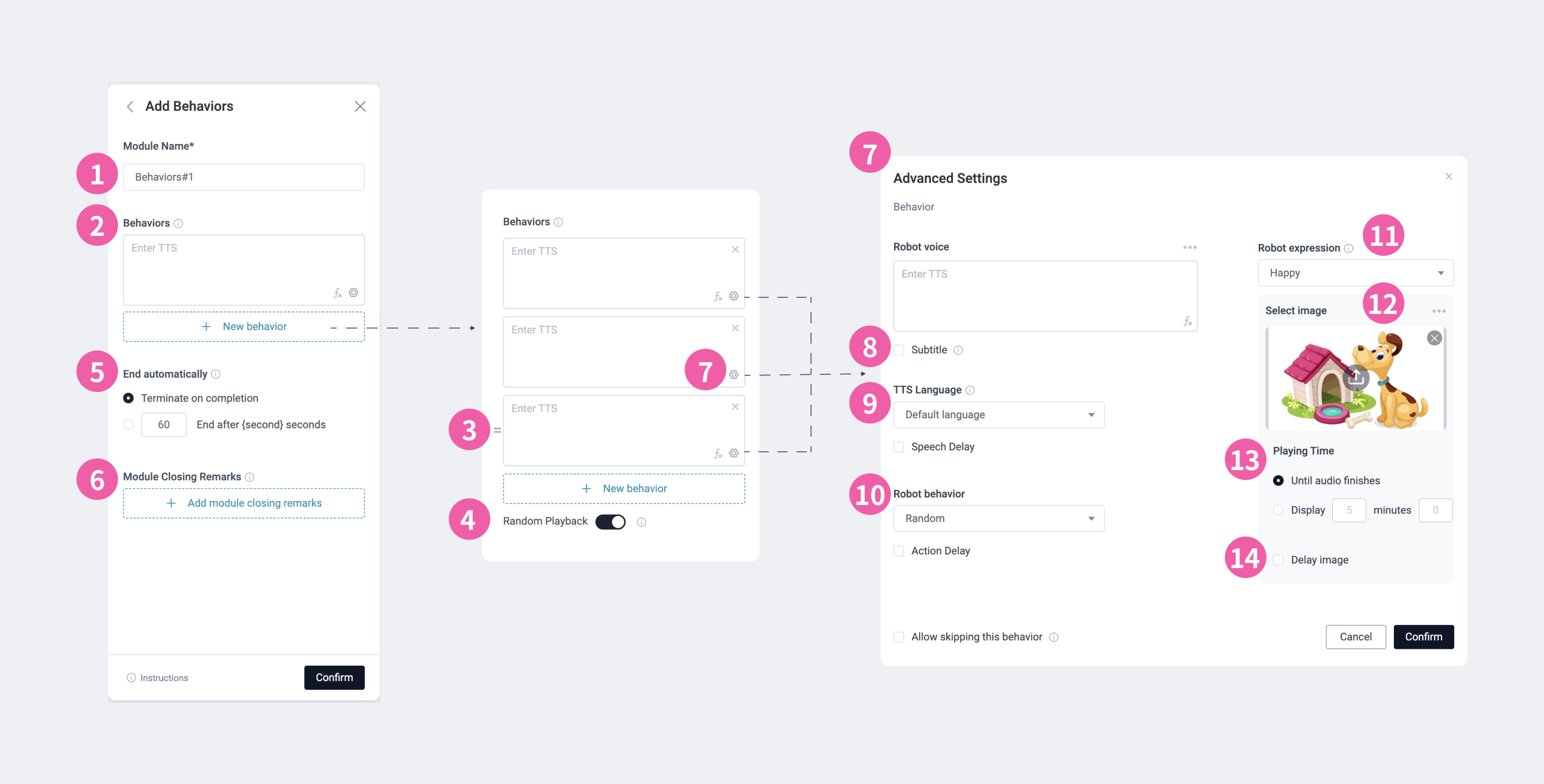
⑯ Advanced Settings: Configure the robot’s speech language, actions, and expressions (images not supported).
⑰ Speech Delay: Adjustable range 0.00 to 999.99 seconds
⑱ Action Delay: Adjustable range 0.00 to 999.99 seconds