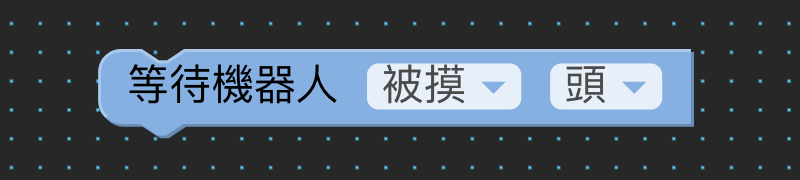
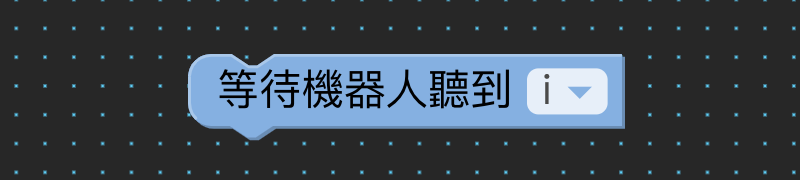
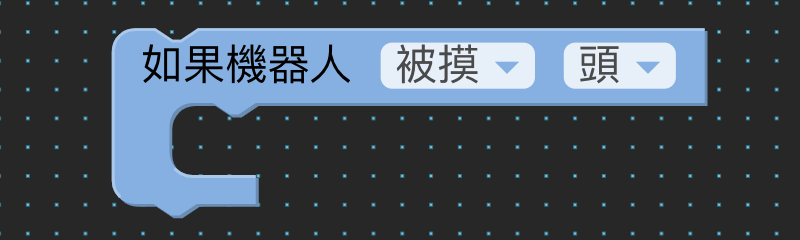
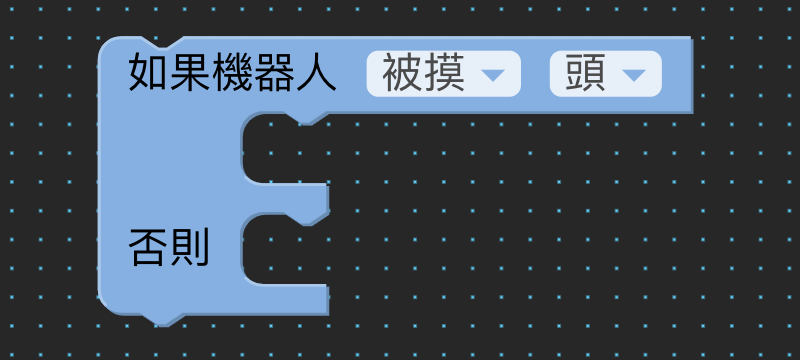
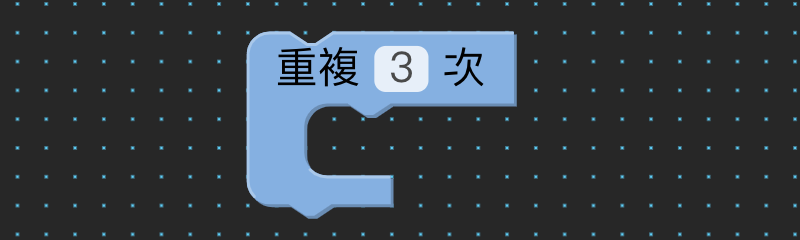
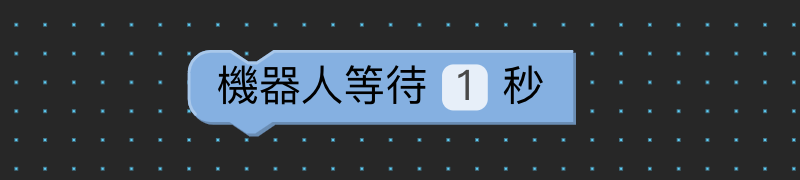
编程方块一览 AI 感测方块 607 views 开始 以滑鼠移动并点击「开始」,即会显示具有开始功能的方块。 如果该方块上边缘没有下凹,则上方无法再连接任何方块。 此区域包含的方块有:「开始」、「当机器人」、「连线至 IOT 服务器」、「连接 Motoduino」。 当机器人 _ _ 定义 – 條件式在编辑程式的过程中,常常需要使用「条件式」来判断某种情况是否成立,配合条件式来决定执行不同的方块。这种程式流程称为选择结构。 选择结构有分为单向选择结构及双向选择结构。当机器人、等待机器人、如果机器人等的方块属于单向选择结构,判断当条件成立时,要执行的程式指令。 说明当机器人被摸特定的部位、或听到特定的字句、或看到特定的人物时,才会开始执行往下的流程。 点击方块内的下拉选单,可以改变触发机器人开始执行流程的方式,分为「被摸」、「听到」、「看到」。还可以设定被摸的部位、听到的字句及看到的人物。 📒 补充:「看到」只限已经登录的人像,需要与机器人连线后,才可以选择看到的对象。未与机器人连线时,可以添加临时家人昵称用于模拟器测试。范例点击左侧选单「开始」的目录,将「当机器人」的方块拖拉到画布中,触发条件选择「听到」。 输入「听到」的字句,例如「您好」。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 对机器人讲出「您好」(或在模拟器选择「听到」,再输入「您好」)。 重置机器人 _ 说明此方块可以重置机器人的肢体、显示、声音、灯光,或者全部重置到最初始的状态。范例点击左侧选单「动作」的目录,将「左肩上抬」拖拉到画布中,并选择上抬「100°」。 点击左侧选单「灯光」的目录,将「全身发光」拖拉到画布中,并选择颜色「紫色」。 点击左侧选单「脸部」的目录,将「角色」拖拉到画布中,并选择角色「明星」。点击左侧选单「开始」的目录,将「重置机器人」的方块拖拉到画布中。 点解下拉选单,选择「肢体」。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 跳到開始 說明重覆执行从「开始」到「跳到开始」之间的所有流程。 📒 补充:此方块只能放置于「开始」方块的流程末端。其他作为开始的方块,例如当机器人,它的流程无法使用「跳到开始」。 (流程:可以执行的连续的一串方块)范例点击左侧选单「动作」的目录,将两个「左肩上抬」的方块拖拉到画布中,并选择上抬「90°」和「0°」。 点击左侧选单「开始」的目录,将「跳到开始」放在末端。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 ‼ ️ 注意事项:已经执行的动作不会自动复原。 例如动作为「右肩上抬」,机器人于第一次「右肩上抬」后,动作会维持在「右肩上抬」,不会复原。若要机器人重覆执行该动作时,要记得要加入让动作复原的方块。 结束程式 说明此方块可以立即结束当前执行的程式。 范例点击左侧选单「控制」的目录,将「如果机器人,否则」拖拉到画布中。 点击左侧选单「声音」的目录,将两个「说 『__』 」分别拖拉到「如果机器人」与「否则」的缺口里,并输入「答对」与「不对,再试一次」。 点击左侧选单「开始」的目录,将「结束程式」拖拉到「答对」的下方。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 控制 等待机器人 _ _ 定义 – 订制块基于机器人硬体优势所订制,可以控制机器人行为表现的方块。包含的目录有:开始、控制、动作、脸部、灯光、声音、主题表演、女娲素材库、扩充方块等。 说明等待机器人被摸特定的部位、或听到特定的字句、或看到特定的人物时,才会开始执行往下的流程。 点击方块内的下拉选单,可以改变触发机器人开始执行流程的方式,分为「被摸」、「听到」、「看到」。还可以设定被摸的部位、听到的字句及看到的人物。 📒 补充:「看到」只限已经登录的人像,需要与机器人连线后,才可以选择看到的对象。未与机器人连线时,可以添加临时家人昵称用于模拟器测试。 范例点击左侧选单「控制」的目录,将「等待机器人」拖拉到画布中。 点击下拉选单,触发条件选择「被摸」、「左手」。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 触摸机器人的左手(或在模拟器选择「摸左手」)。 等待机器人听到 _ 说明可以与变数协作的方块。首先要先建立一个变数(或使用自动建立的变数),等待机器人听到该变数时,才会执行往下的流程。 范例点击左侧选单「控制」的目录,将「等待机器人听到」拖拉到画布中。 点击左侧选单「声音」的目录,将「说『__』」拖拉到「等待机器人听到」的下方。 点击左侧选单「变数」的目录,将「i」拖拉进「说『__』」的缺口里。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 同时执行 定义 – 同时执行两种以上的程式指令同步运行,以达到特定的目的或效果,是编辑程式经常用到的指令。 说明拖拉并包裹在「同时执行」方块缺口里的流程会同步运行。缺口内的所有方块执行完成后,标志着同时执行块执行完毕,可以继续执行往下的方块。 范例点击左侧选单「控制」的目录,将「同时执行」拖拉到画布中。 点击左侧选单「动作」的目录,将「左肩上抬」和「右肩上抬」拖拉进「同时执行」的缺口里,并选择上抬「130°」。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 ‼ ️ 注意事项:「同时执行」缺口内的流程不能出现互相矛盾的行为。 互相矛盾的方块会造成占用冲突,在两个或两个以上的方块同时需要使用机器人萤幕、led 灯或关节时(如左肩上抬10°、左肩上抬20°),无法满足所有方块的期待结果。在实际执行中遇到占用冲突,通常会满足最后一个方块的期待结果。 如果机器人如果机器人 _ _ 定义-执行体方块的上下可以连接其他方块外,内部还可以包含其他程式,这里的「内部」就是执行体,包含执行体的块有很多,例如:「同时执行」、「如果机器人」、「如果机器人,否则」、「重复_次」、「永久重复」、「重复当,执行」、「循环计数,执行」、「如果,执行」、「取出每个_自清单,执行」、「到功能 1」等等。 说明如果机器人被摸特定的部位、或听到特定的字句、或看到特定的人物时,就会开始执行方块内的流程。如果没有达到触发条件,就会跳过此方块,继续往下执行流程的指令。 点击下拉选单,可以改变触发机器人开始执行流程的方式,分为「被摸」、「听到」、「看到」。还可以设定被摸的部位、听到的字句及看到的人物。 将达成触发条件时需要执行的流程拖拉进「如果机器人」的缺口里。 📒 补充:「看到」只限已经登录的人像,需要与机器人连线后,才可以选择看到的对象。未与机器人连线时,可以添加临时家人昵称用于模拟器测试。 范例点击左侧选单「控制」的目录,将「如果机器人」拖拉到画布中。触发条件选择「被摸」、「肚子」。 点击左侧选单「动作」的目录,将「左肩上抬」和「右肩上抬」的方块拖拉到画布中,并选择上抬「90°」。 将「左肩上抬 90°」拖拉进「如果机器人」的缺口里,「右肩上抬 90°」拖拉到方块的下方。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 触摸机器人的肚子(或在模拟器选择「摸肚子」,或不触摸,稍等片刻)。 如果机器人 _ _,否则 > 定义-条件式「条件式」可以判断某种情况是否成立,配合条件式来决定执行不同的方块,这称为选择结构。选择结构有分为单向选择结构及双向选择结构。 「如果机器人,否则」属于双向选择结构。 说明如果机器人被摸特定的部位、听到特定的字句,或看到特定的人物,以上其中一个触发条件成立时,就会执行「如果机器人」缺口里的流程。如果触发条件不成立,就会执行「否则」缺口里的流程。 点击下拉选单,可以改变触发机器人开始执行指令的方式,分为「被摸」、「听到」、「看到」。还可以设定被摸的部位、听到的字句及看到的人物。 📒 补充:「看到」只限已经登录的人像,需要与机器人连线后,才可以选择看到的对象。未与机器人连线时,可以添加临时家人昵称用于模拟器测试。 范例点击左侧选单「控制」的目录,将「如果机器人,否则」拖拉到画布中,触发条件选择「被摸」、「右手」。 点击左侧选单「动作」的目录,将「左肩上抬」和「右肩上抬」拖拉到画布中,并选择上抬「120°」。 「左肩上抬 120°」拖拉到「如果机器人」的方块内,「右肩上抬 120°」拖拉到「否则」的方块内。 将流程拖拉到「开始」的下方后,选择播放的设备– 我的机器人(或模拟器)。 触摸机器人的肚子(或在模拟器选择「摸肚子」)。 (或不触摸,稍等片刻) 重复 _ 次 说明将需要重覆执行的流程放在「重复 _ 次」的缺口里,可以设定同一组流程要重复执行的次数。 范例点击左侧选单「控制」的目录,将「重复 _ 次」拖拉到画布中,并选择重覆「2」次。 点击左侧选单「动作」的目录,将两个「左肩内转」拖拉进「重复 _ 次」的缺口里,并选择内转「0°」和「90°」。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 永久重复 > 说明将需要不断重复执行的流程拖拉进「永久重复」的缺口里,永久重复执行缺口里的同一组流程。 范例点击左侧选单「控制」的目录,将「永久重复」拖拉到画布中。 点击左侧选单「动作」的目录,将两个「右肩内转」拖拉进「永久重复」的缺口里,并选择内转「0°」和「120°」。 将流程拖拉到「开始」的下方后,选择播放的设备– 我的机器人(或模拟器)。 机器人等待 _ 秒 说明前一个流程完成执行后,在进行下一个流程前,可以设定两个指令之间的等待时间,等待时间结束后继续执行往下的方块。这样可以扩大流程之间的执行时间差,让流程延迟进行。 范例点击左侧选单「控制」的目录,将「机器人等待」拖拉到画布中。 点击左侧选单「动作」的目录,将两个「左肩上抬」拖拉到画布中,并选择上抬「0°」和「90°」。 将左肩上抬「0°」拖拉到「机器人等待」的上方,左肩上抬「90°」拖拉到「机器人等待」的下方。 选择机器人等待「3」秒。 将流程拖拉到「开始」的下方后,选择播放的设备 – 我的机器人(或模拟器)。 ← 上一篇:编程方块一览 前往阅读:动作与演出