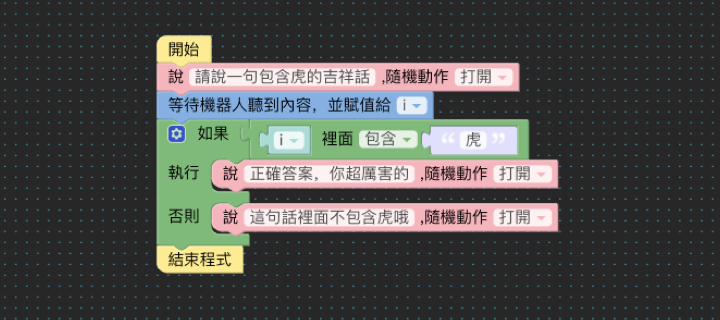
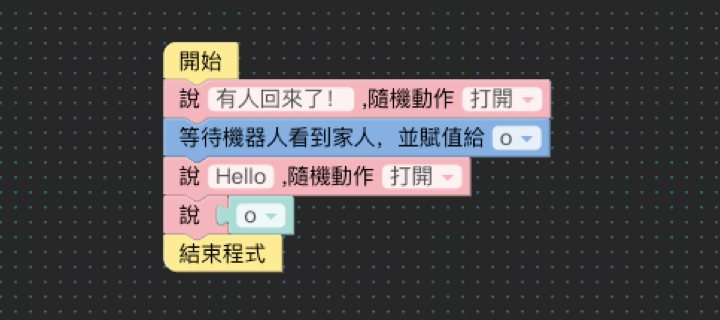
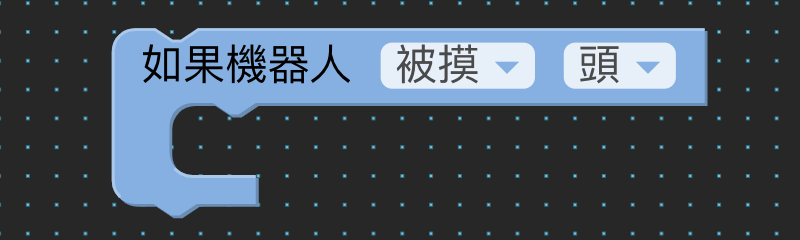
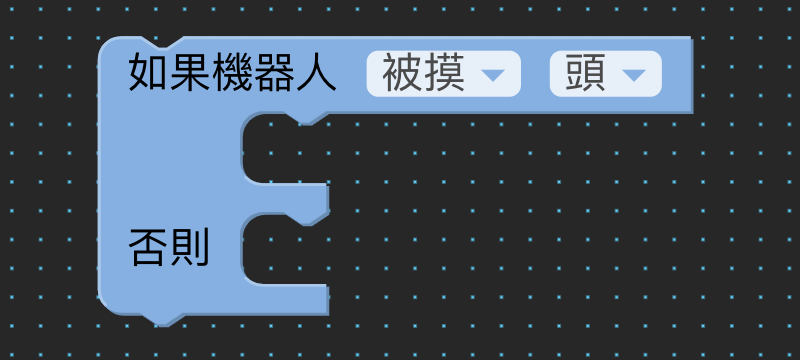
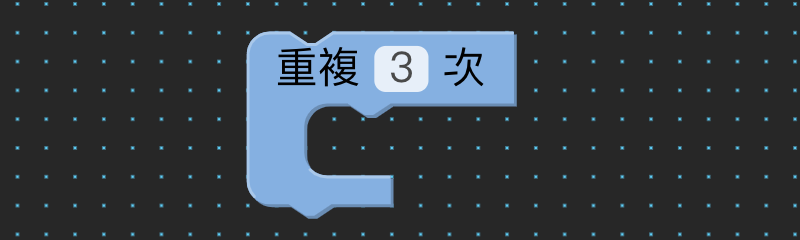
AI 感測方塊 開始 以滑鼠移動並點擊「開始」,即會顯示具有開始功能的方塊。如果該方塊上邊緣沒有下凹,則上方無法再連接任何方塊。此區域包含的方塊有:「開始」、「當機器人」、「連線至 IOT 服務器」、「連接 Motoduino」。 當機器人 _ _ 定義 – 條件式在編輯程式的過程中,常常需要使用「條件式」來判斷某種情況是否成立,配合條件式來決定執行不同的方塊。這種程式流程稱為選擇結構。選擇結構有分為單向選擇結構及雙向選擇結構。當機器人、等待機器人、如果機器人等的方塊屬於單向選擇結構,判斷當條件成立時,要執行的程式指令。說明當機器人被摸特定的部位、或聽到特定的字句、或看到特定的人物時,才會開始執行往下的流程。點擊方塊內的下拉選單,可以改變觸發機器人開始執行流程的方式,分為「被摸」、「聽到」、「看到」。還可以設定被摸的部位、聽到的字句及看到的人物。📒 補充:「看到」只限已經登錄的人像,需要與機器人連線後,才可以選擇看到的對象。未與機器人連線時,可以添加臨時家人暱稱用於模擬器測試。範例點擊左側選單「開始」的目錄,將「當機器人」的方塊拖拉到畫布中,觸發條件選擇「聽到」。輸入「聽到」的字句,例如「您好」。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。對機器人講出「您好」(或在模擬器選擇「聽到」,再輸入「您好」)。 重置機器人 _ 說明此方塊可以重置機器人的肢體、顯示、聲音、燈光,或者全部重置到最初始的狀態。範例點擊左側選單「動作」的目錄,將「左肩上抬」拖拉到畫布中,並選擇上抬「100°」。點擊左側選單「燈光」的目錄,將「全身發光」拖拉到畫布中,並選擇顏色「紫色」。點擊左側選單「臉部」的目錄,將「角色」拖拉到畫布中,並選擇角色「明星」。點擊左側選單「開始」的目錄,將「重置機器人」的方塊拖拉到畫布中。點解下拉選單,選擇「肢體」。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。 跳到開始 說明重覆執行從「開始」到「跳到開始」之間的所有流程。📒 補充:此方塊只能放置於「開始」方塊的流程末端。其他作為開始的方塊,例如當機器人,它的流程無法使用「跳到開始」。(流程:可以執行的連續的一串方塊)範例點擊左側選單「動作」的目錄,將兩個「左肩上抬」的方塊拖拉到畫布中,並選擇上抬「90°」和「0°」。點擊左側選單「開始」的目錄,將「跳到開始」放在末端。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。‼️ 注意事項:已經執行的動作不會自動復原。例如動作為「右肩上抬」,機器人於第一次「右肩上抬」後,動作會維持在「右肩上抬」,不會復原。若要機器人重覆執行該動作時,要記得要加入讓動作復原的方塊。 結束程式 說明此方塊可以立即結束當前執行的程式。範例點擊左側選單「控制」的目錄,將「如果機器人,否則」拖拉到畫布中。點擊左側選單「聲音」的目錄,將兩個「說 『__』 」分別拖拉到「如果機器人」與「否則」的缺口裡,並輸入「答對」與「不對,再試一次」。點擊左側選單「開始」的目錄,將「結束程式」拖拉到「答對」的下方。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。 控制 等待機器人 _ _ 定義 – 訂製塊基於機器人硬體優勢所訂製,可以控制機器人行為表現的方塊。包含的目錄有:開始、控制、動作、臉部、燈光、聲音、主題表演、女媧素材庫、擴充方塊等。說明等待機器人被摸特定的部位、或聽到特定的字句、或看到特定的人物時,才會開始執行往下的流程。點擊方塊內的下拉選單,可以改變觸發機器人開始執行流程的方式,分為「被摸」、「聽到」、「看到」。還可以設定被摸的部位、聽到的字句及看到的人物。📒 補充:「看到」只限已經登錄的人像,需要與機器人連線後,才可以選擇看到的對象。未與機器人連線時,可以添加臨時家人暱稱用於模擬器測試。範例點擊左側選單「控制」的目錄,將「等待機器人」拖拉到畫布中。點擊下拉選單,觸發條件選擇「被摸」、「左手」。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。觸摸機器人的左手(或在模擬器選擇「摸左手」)。 等待機器人聽到內容,並賦值給 _ 說明可以與變數協作的方塊。首先要先建立一個變數(或使用自動建立的變數),等待機器人聽到該變數時,才會執行往下的流程。範例出一個題目為「包含虎的吉祥話」,並判斷機器人接收到的語音中是否包含虎,並設定「如果有」執行答對的對話,「否則」執行答錯的對話 等待機器人看到家人,並賦值給 _ 說明可以與變數協作的方塊。首先要先建立一個變數(或使用自動建立的變數),等待機器人看到家人,並將家人賦值為該變數時,才會執行往下的流程。範例 將機器人看到的家人賦值成「變數」,並搭配「說」方塊,可以讓機器人說出看見的家人。 同時執行 定義 – 同時執行兩種以上的程式指令同步運行,以達到特定的目的或效果,是編輯程式經常用到的指令。說明拖拉並包裹在「同時執行」方塊缺口裡的流程會同步運行。缺口內的所有方塊執行完成後,標誌著同時執行塊執行完畢,可以繼續執行往下的方塊。範例點擊左側選單「控制」的目錄,將「同時執行」拖拉到畫布中。點擊左側選單「動作」的目錄,將「左肩上抬」和「右肩上抬」拖拉進「同時執行」的缺口裡,並選擇上抬「130°」。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。‼️ 注意事項:「同時執行」缺口內的流程不能出現互相矛盾的行為。互相矛盾的方塊會造成佔用衝突,在兩個或兩個以上的方塊同時需要使用機器人螢幕、led 燈或關節時(如左肩上抬10°、左肩上抬20°),無法滿足所有方塊的期待結果。在實際執行中遇到佔用衝突,通常會滿足最後一個方塊的期待結果。 如果機器人如果機器人 _ _ 定義-執行體方塊的上下可以連接其他方塊外,內部還可以包含其他程式,這裡的「內部」就是執行體,包含執行體的塊有很多,例如:「同時執行」、「如果機器人」、「如果機器人,否則」、「重複_次」、「永久重複」、「重複當,執行」、「循環計數,執行」、「如果,執行」、「取出每個_自清單,執行」、「到功能 1」等等。說明如果機器人被摸特定的部位、或聽到特定的字句、或看到特定的人物時,就會開始執行方塊內的流程。如果沒有達到觸發條件,就會跳過此方塊,繼續往下執行流程的指令。點擊下拉選單,可以改變觸發機器人開始執行流程的方式,分為「被摸」、「聽到」、「看到」。還可以設定被摸的部位、聽到的字句及看到的人物。將達成觸發條件時需要執行的流程拖拉進「如果機器人」的缺口裡。📒 補充:「看到」只限已經登錄的人像,需要與機器人連線後,才可以選擇看到的對象。未與機器人連線時,可以添加臨時家人暱稱用於模擬器測試。範例點擊左側選單「控制」的目錄,將「如果機器人」拖拉到畫布中。觸發條件選擇「被摸」、「肚子」。點擊左側選單「動作」的目錄,將「左肩上抬」和「右肩上抬」的方塊拖拉到畫布中,並選擇上抬「90°」。將「左肩上抬 90°」拖拉進「如果機器人」的缺口裡,「右肩上抬 90°」拖拉到方塊的下方。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。觸摸機器人的肚子(或在模擬器選擇「摸肚子」,或不觸摸,稍等片刻)。 如果機器人 _ _,否則 > 定義-條件式「條件式」可以判斷某種情況是否成立,配合條件式來決定執行不同的方塊,這稱為選擇結構。選擇結構有分為單向選擇結構及雙向選擇結構。「如果機器人,否則」屬於雙向選擇結構。說明如果機器人被摸特定的部位、聽到特定的字句,或看到特定的人物,以上其中一個觸發條件成立時,就會執行「如果機器人」缺口裡的流程。如果觸發條件不成立,就會執行「否則」缺口裡的流程。點擊下拉選單,可以改變觸發機器人開始執行指令的方式,分為「被摸」、「聽到」、「看到」。還可以設定被摸的部位、聽到的字句及看到的人物。📒 補充:「看到」只限已經登錄的人像,需要與機器人連線後,才可以選擇看到的對象。未與機器人連線時,可以添加臨時家人暱稱用於模擬器測試。範例點擊左側選單「控制」的目錄,將「如果機器人,否則」拖拉到畫布中,觸發條件選擇「被摸」、「右手」。點擊左側選單「動作」的目錄,將「左肩上抬」和「右肩上抬」拖拉到畫布中,並選擇上抬「120°」。「左肩上抬 120°」拖拉到「如果機器人」的方塊內,「右肩上抬 120°」拖拉到「否則」的方塊內。將流程拖拉到「開始」的下方後,選擇播放的設備– 我的機器人(或模擬器)。觸摸機器人的肚子(或在模擬器選擇「摸肚子」)。(或不觸摸,稍等片刻) 重複 _ 次 說明將需要重覆執行的流程放在「重複 _ 次」的缺口裡,可以設定同一組流程要重複執行的次數。範例點擊左側選單「控制」的目錄,將「重複 _ 次」拖拉到畫布中,並選擇重覆「2」次。點擊左側選單「動作」的目錄,將兩個「左肩內轉」拖拉進「重複 _ 次」的缺口裡,並選擇內轉「0°」和「90°」。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。 永久重複 > 說明將需要不斷重複執行的流程拖拉進「永久重複」的缺口裡,永久重複執行缺口裡的同一組流程。範例點擊左側選單「控制」的目錄,將「永久重複」拖拉到畫布中。點擊左側選單「動作」的目錄,將兩個「右肩內轉」拖拉進「永久重複」的缺口裡,並選擇內轉「0°」和「120°」。將流程拖拉到「開始」的下方後,選擇播放的設備– 我的機器人(或模擬器)。 機器人等待 _ 秒 說明前一個流程完成執行後,在進行下一個流程前,可以設定兩個指令之間的等待時間,等待時間結束後繼續執行往下的方塊。這樣可以擴大流程之間的執行時間差,讓流程延遲進行。範例點擊左側選單「控制」的目錄,將「機器人等待」拖拉到畫布中。點擊左側選單「動作」的目錄,將兩個「左肩上抬」拖拉到畫布中,並選擇上抬「0°」和「90°」。將左肩上抬「0°」拖拉到「機器人等待」的上方,左肩上抬「90°」拖拉到「機器人等待」的下方。選擇機器人等待「3」秒。將流程拖拉到「開始」的下方後,選擇播放的設備 – 我的機器人(或模擬器)。 ← 上一篇:程式方塊一覽 前往閱讀:動作與演出