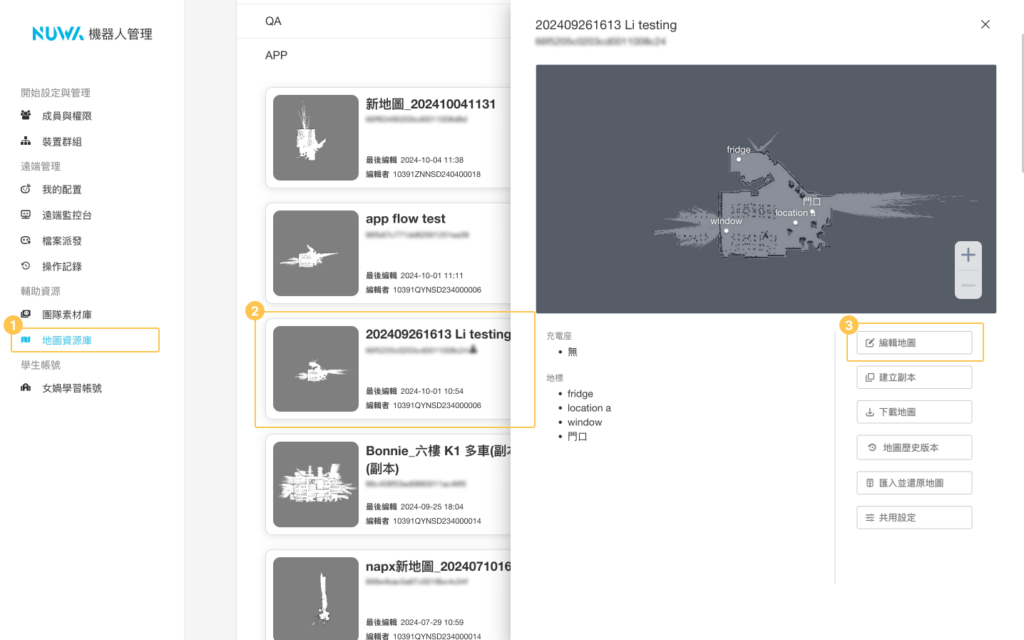
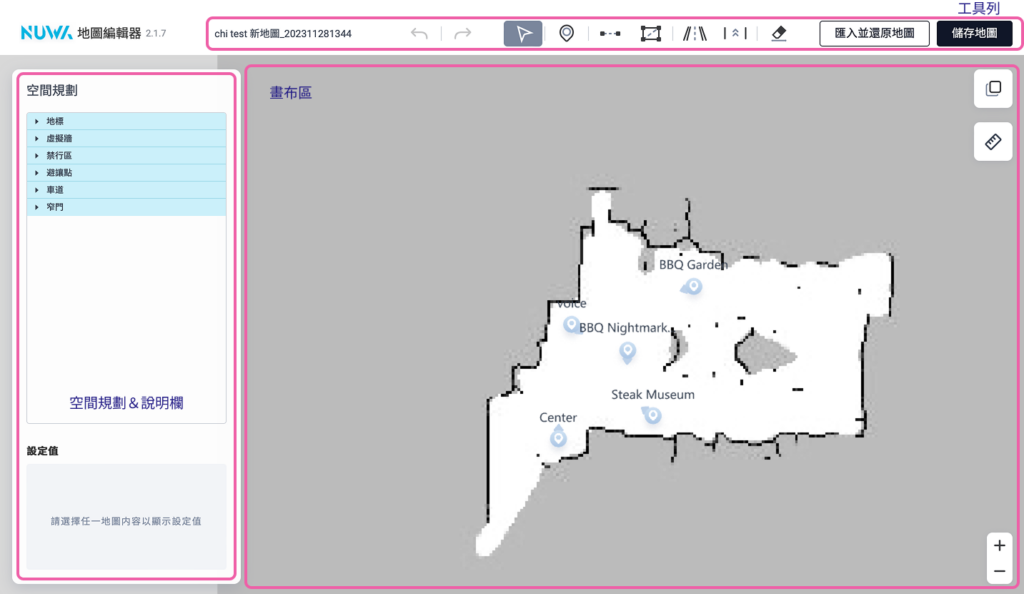
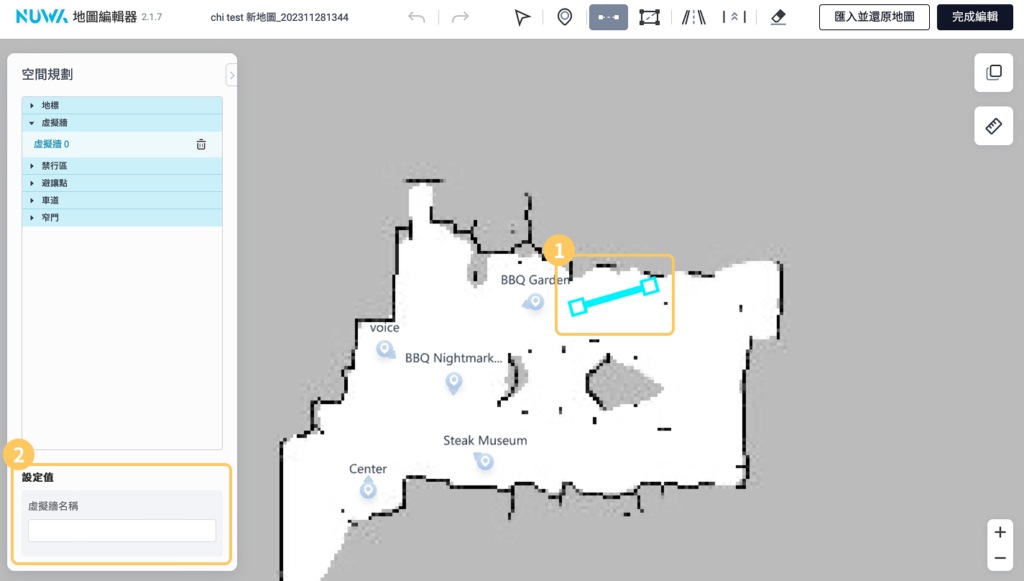
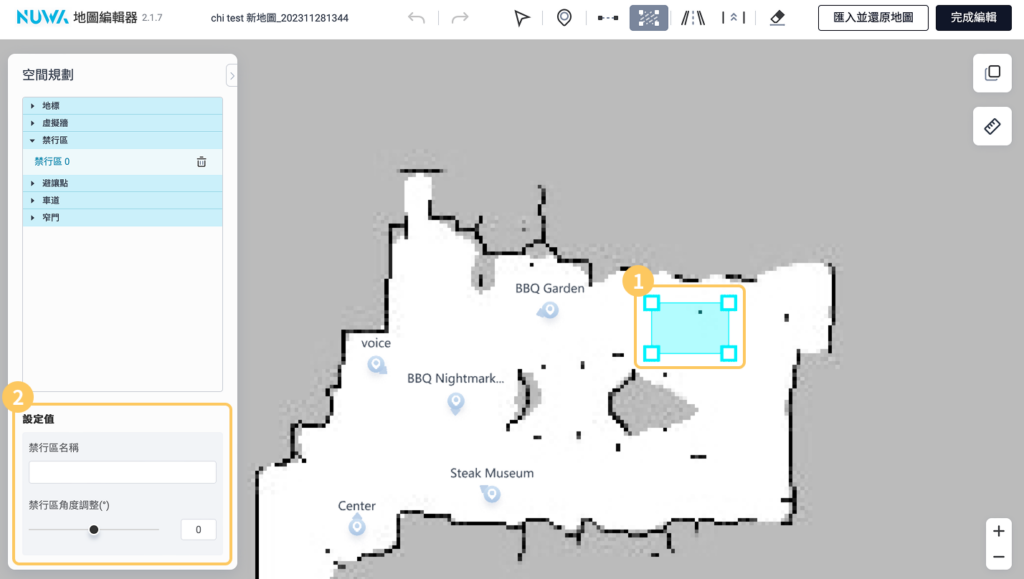
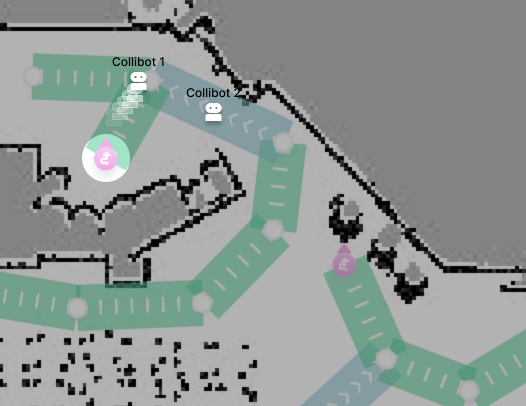
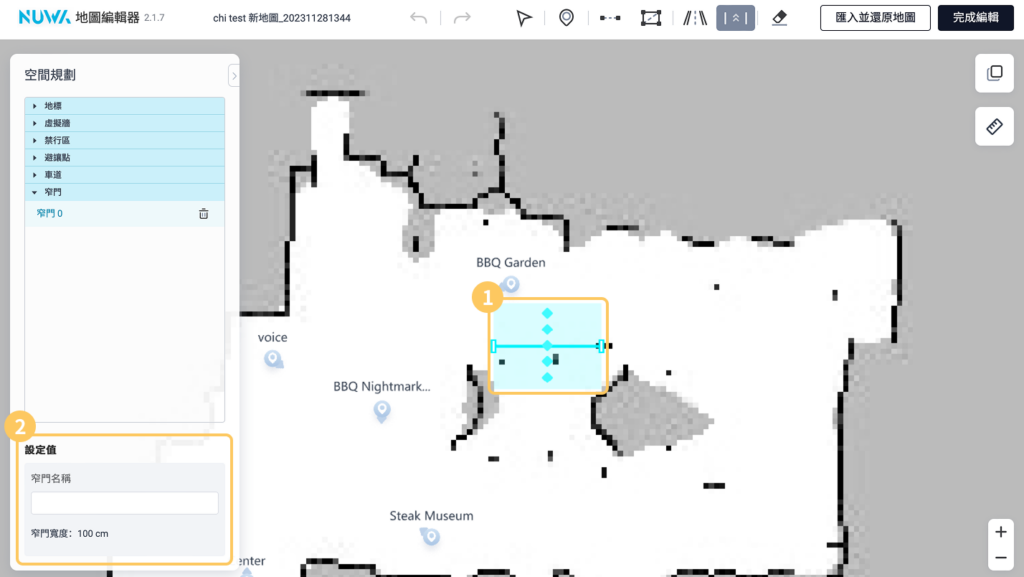
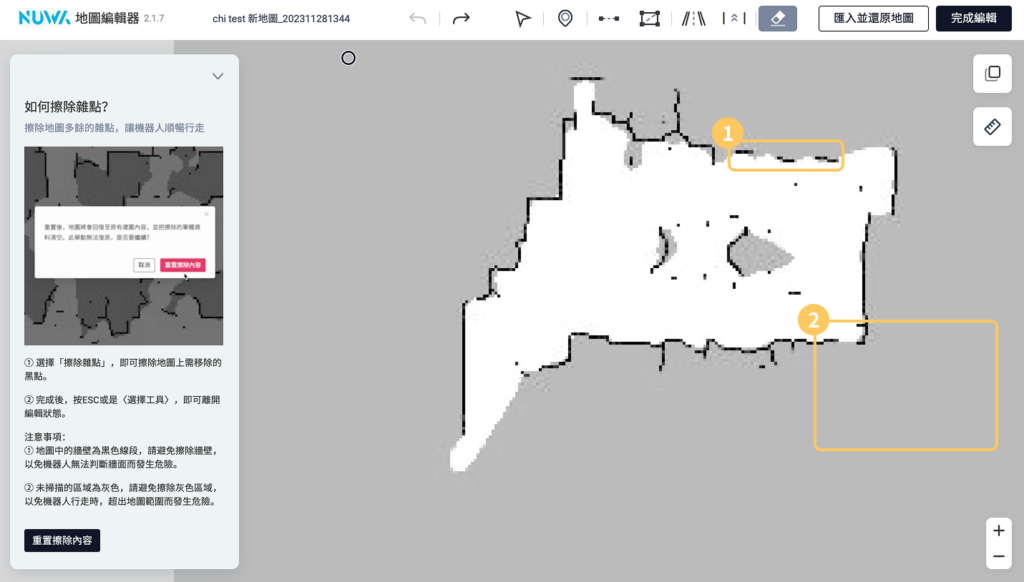
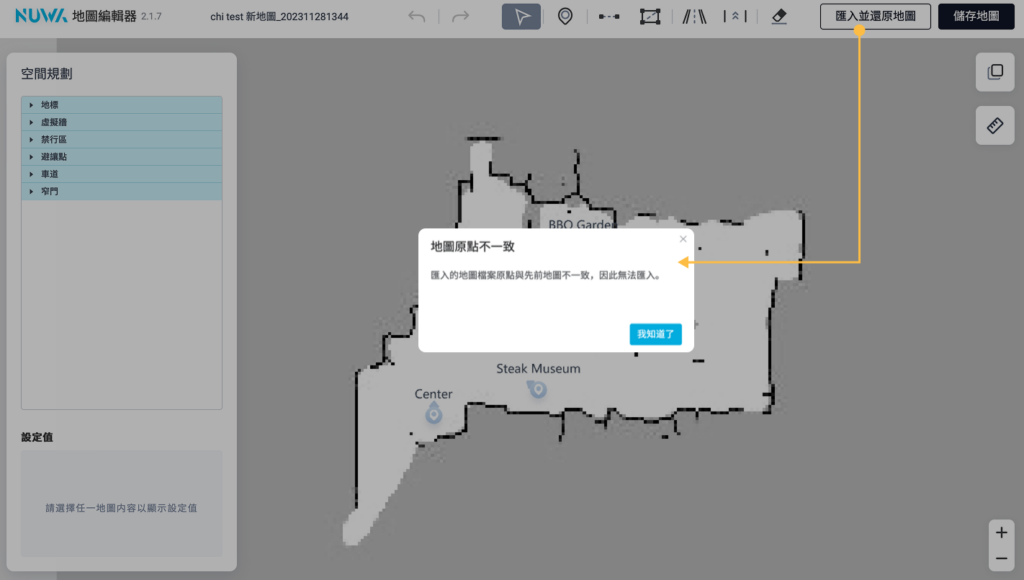
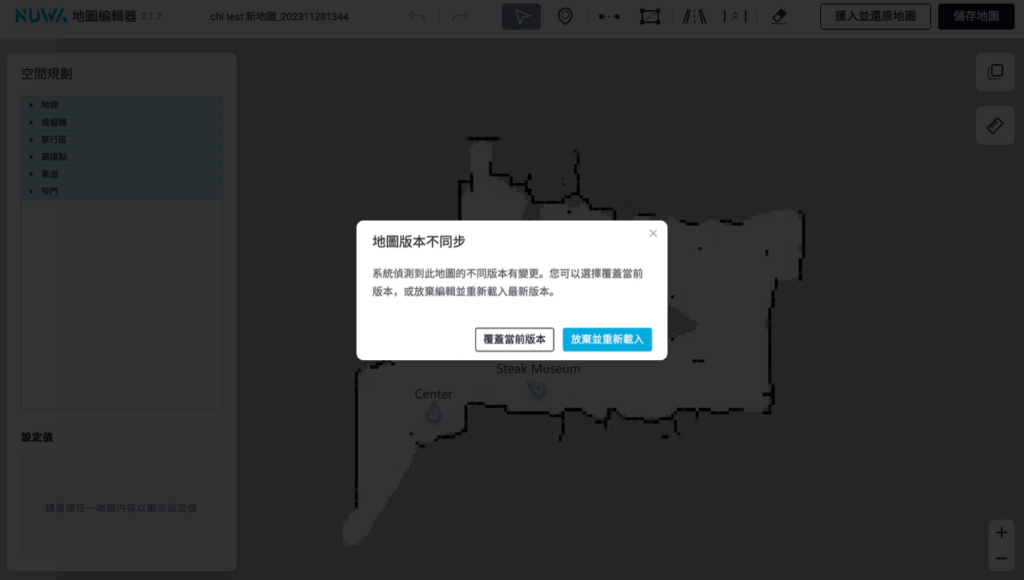
機器人管理系統 地圖編輯器 757 views 使用地圖編輯器,您可以雲端編輯團隊內服務型機器人的地圖。所有原先在機器人端的地圖編輯功能都已整合到地圖編輯器中,並新增了車道編輯功能,以支援多車協作。 如何使用地圖編輯器?請先進入《地圖資源庫》,點擊要編輯的地圖,即可進入編輯畫面。進入地圖資源庫 → 版面介紹 編輯器版面分為三⼤區塊:空間規劃及說明欄、⼯具列與地圖畫布區。 ① 空間規劃及說明欄空間規劃列表中顯示所有地圖標示資料(地標、虛擬牆、禁行區等),在列表中選擇資料名稱即可針對所選內容調整設定值。 ② 工具列上方工具列包含復原/重做、地標、虛擬牆、禁行區、車道與避車點、以及擦除雜點等功能,詳細說明請參考工具操作說明。 ③ 地圖畫布區 地圖畫布點擊右下角「+ -」縮放按鈕、或滾動滑鼠滾輪,可以縮放地圖檢視大小。滑鼠點擊拖曳地圖畫布空白處,可以移動檢視範圍。 顯示設定 進入地圖編輯後,此功能紐位於畫面右上方。可以勾選想要檢視的地圖物件,預設為全部勾選。 量測距離 可以點擊地圖畫布中任二點,測量距離作為編輯地圖參考。 工具操作說明 選擇工具可以移動畫布或選擇地圖物件。點擊右下角「+ -」按鈕、滾動滑鼠,可以縮放地圖檢視大小。滑鼠點擊拖曳地圖畫布空白處,可以移動檢視範圍。點選地圖上的物件,可以選取並編輯物件設定值。 地標可以新增或移動機器人的導航地點。① 新增地標:選擇「地標」工具,點擊畫布將地標設置於機器人在地圖中可行走的範圍內。 ② 可於左側「空間規劃」的設定值,調整機器人朝向角度和地標名稱。 虛擬牆可以新增或編輯虛擬牆;虛擬牆是機器人不能穿越的屏障,設置虛擬牆可以確保機器人走在正確的路上。新增虛擬牆:選擇「虛擬牆」,在地圖空白處拖曳線段,完成虛擬牆建置。移動虛擬牆節點以編輯虛擬牆形狀。 禁行區可以新增或編輯禁行區;禁行區為機器人不能進入的區域,建立禁行區可以防止機器人走到非服務區域。① 新增虛擬牆:選擇「禁行區」,在地圖空白處拖曳區塊,建立禁行區。 ② 可於左側「空間規劃」的設定值,調整禁行區的角度。移動禁行區節點以縮放禁行區大小 車道(與建立避讓點)可以新增或編輯車道與避車點;「車道」與「避讓點」能協助兩台機器人在同一場域中會車時進行避讓。① 新增車道:選擇「車道」,在地圖空白處拖曳出線段,滑鼠點兩下或按 Enter,完成車道建立。② 新增避讓點:選取車道節點後,按滑鼠右鍵設定為避讓點。當機器人會車時,最近的機器人會先移動到避讓點等待通行。③ 選擇車道後,可於左側「空間規劃」的設定值,設定單向道或雙向道。*目前單向道僅影響避讓路徑計算,目前未實現單向道功能 注意事項: ① 避讓點必須連結車道,讓多車協作正常運作。(圖中當兩台機器人即將會車,距離避讓點較近的 Collibot 1 會先前往避讓點等待) ② 避讓點為機器人暫時等待處,勿建立在主幹車道的起始節點、中間節點(圖中的禁止符號請勿建立避讓點)。 窄門 設置窄門可以讓機器人居中通過較窄的入口,例如電梯入口或較狹窄的走道。設置窄門點時請注意該環境是否容易有雜物堆積,避免影響機器人通行。選擇「窄門」,在地圖空白處拖曳線段,完成窄門建置。可於左側「空間規劃」的設定值,設定窄門的名稱。 擦除雜點 擦除地圖多餘的雜點,讓機器人順暢行走 ① 選擇「擦除雜點」,即可擦除地圖上需移除的黑點。② 完成後,按 Esc 或是〈選擇工具〉,即可離開編輯狀態。 注意事項: ① 地圖中的牆壁為黑色線段,請避免擦除牆壁,以免機器人無法判斷牆面而發生危險。 ② 未掃描的區域為灰色,請避免擦除灰色區域,以免機器人行走時,超出地圖範圍而發生危險。 復原與重做若要還原或重做步驟,可以點擊「復原」或「重做」,步驟記憶最多保留40次。注意事項:地圖儲存後,仍可以執行還原與重做,但「地圖儲存」不會被作為步驟保留。 匯入並還原地圖若您之前有下載該地圖的備份,您可以匯入地圖檔案進行覆蓋編輯(檔案格式為.zip)。注意事項:當匯入的資料與現行的地圖掃描範圍不同,會出現「地圖原點不一致」的錯誤提醒。匯入時,請使用相同的地圖。 完成編輯並儲存地圖當您已完成編輯地圖的工作,點擊「完成編輯」後將回到選擇工具的狀態。若確定儲存當前版本的地圖,點擊「儲存地圖」。注意事項:當機器人端與雲端正在編輯同一份地圖,在儲存時可能導致衝突,將會出現〈地圖版本不同步〉的錯誤提醒。為了避免影響機器人目前的使用狀況,建議選擇「放棄並重新載入」。 ← 上一篇:地圖資源庫 前往閱讀:RaaS 服務數據