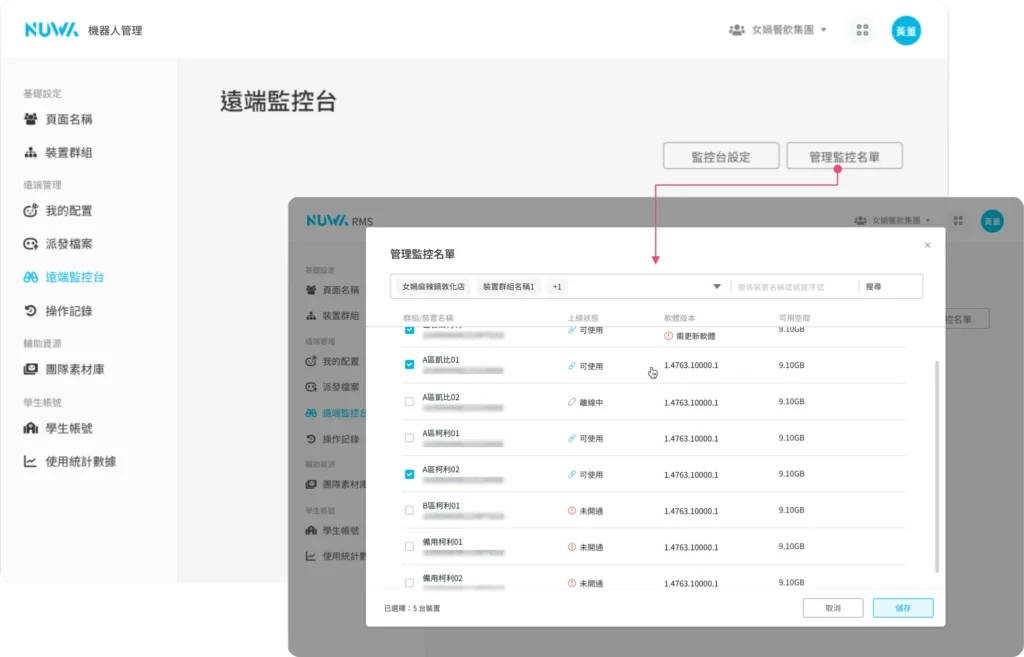
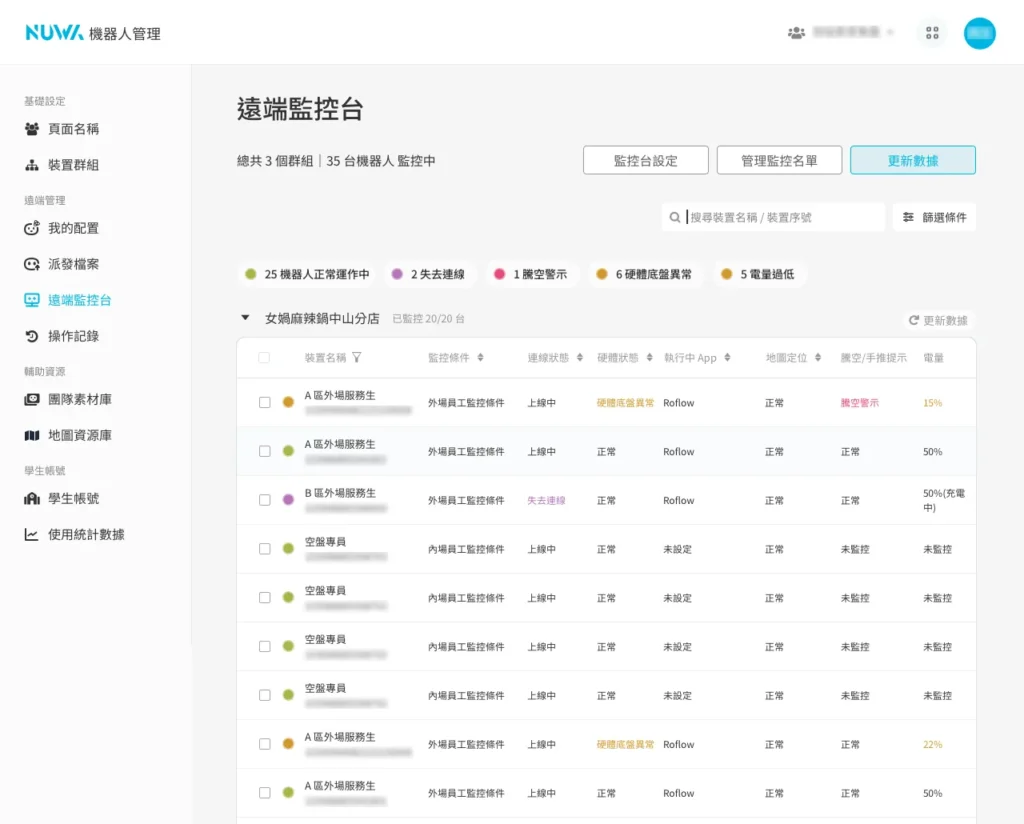
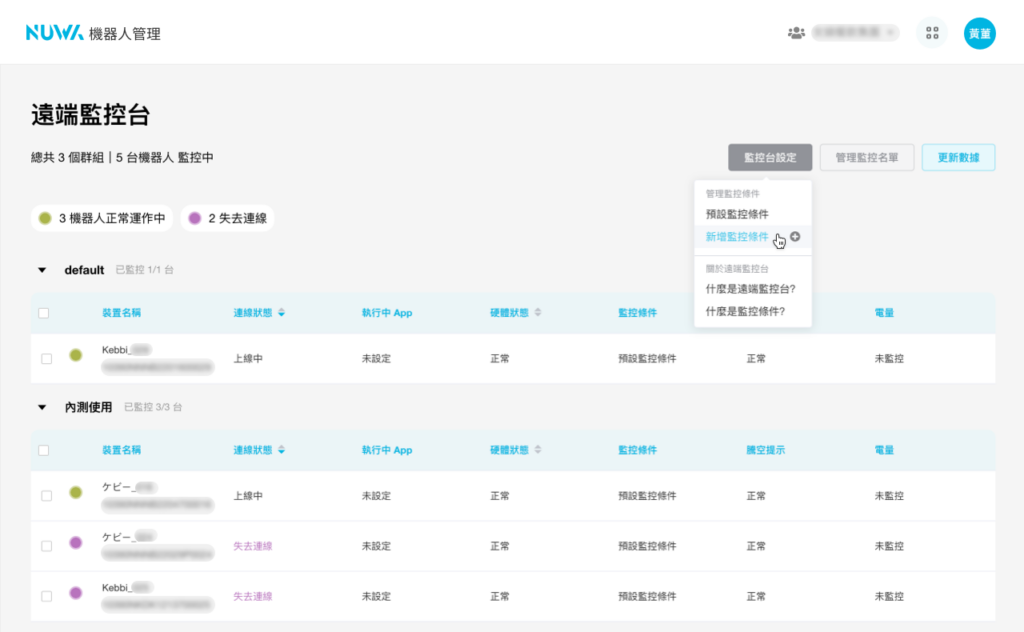
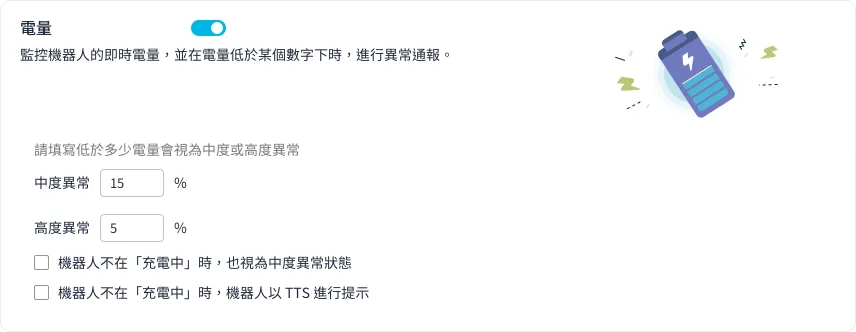
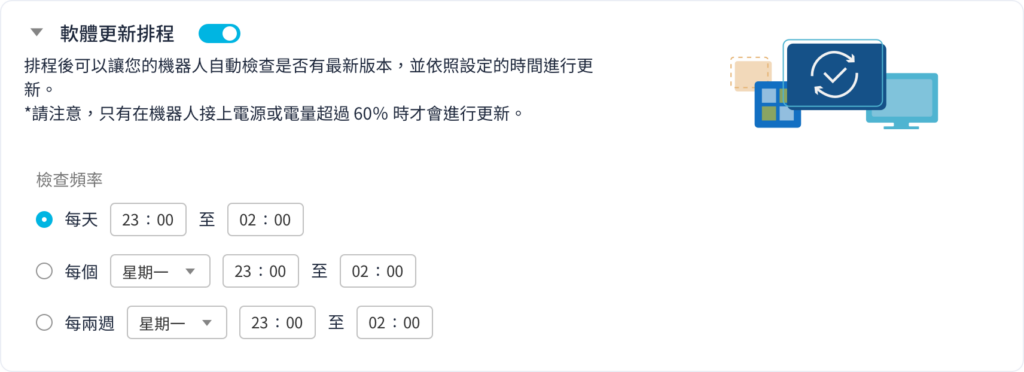
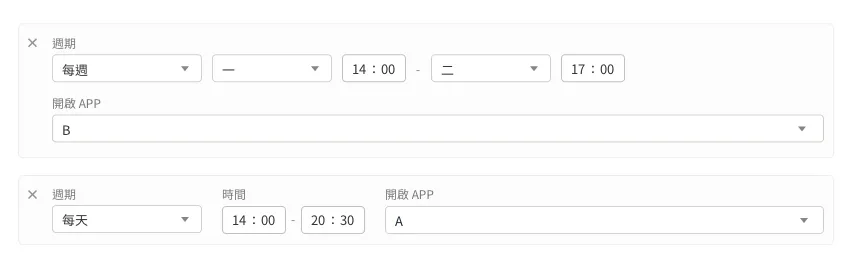
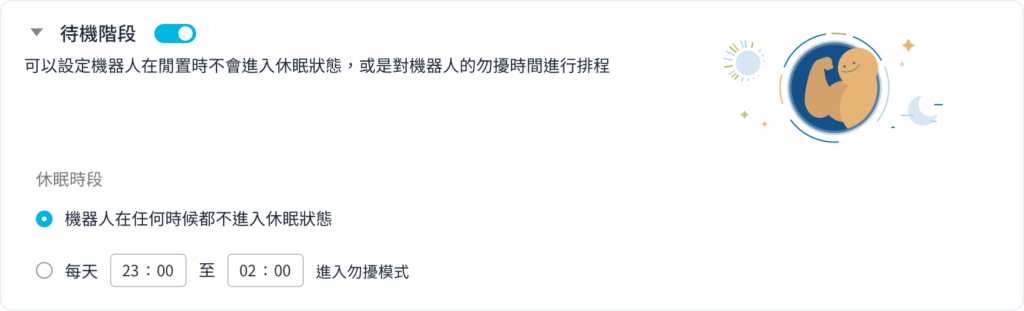
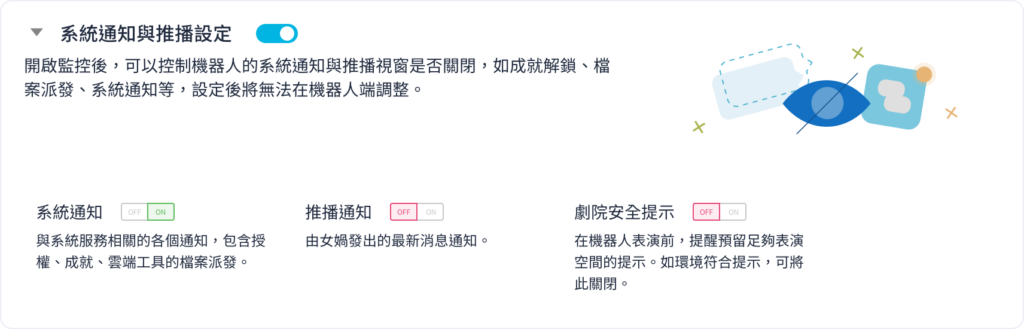
遠端管理 遠端監控台 1407 views 只要使用遠端監控台,就能在線上查看遠端多台機器人當下的工作狀態,並即時排除錯誤或異常。使用遠端監控台前,請務必請務必將機器人更新到最新的版本 Kebbi 系列機器人:OS12.3 以上Collibot 服務型系列機器人:OS1.5.2 以上 開始監控 開始監控機器人前,首先要設定兩個重要項目:「管理監控名單」以及「設立監控條件」。完成後,就可以開始使用遠端監控台了! 一、管理監控名單 選取團隊內要進行監控的裝置,只有被加入監控名單的裝置才會開始被監控。請由畫面右上角「管理監控名單」按鈕進入,管理此名單。 如裝置的軟體版本不支援「遠端監控台」,於機器人軟體版本的下方會出現軟體版本不相容的提示,需要先更新版本才能加入監控清單。 當裝置長期處於離線狀態,RMS 則無法辨識該軟體版本。您一樣可以先加入監控清單,在裝置上線後,監控台會提示您應該先更新再繼續使用。❊ 裝置未登入「檔案管理」App 時,無論上線或離線,都無法加入監控清單中。 加入監控名單的裝置,將會以群組排列展示在「遠端監控台」的頁面上,並套用預設的監控條件。「預設監控條件」會監控裝置最基本的「連線」及「硬體」狀況。❊「預設監控條件」會監控裝置最基本的「連線」及「硬體」狀況。 若有特殊的監控管理需求,請參見下一步:設定監控條件。 二、設立監控條件 在監控清單中,我們可以點擊「監控台設定」按鈕來套用或建立新的監控條件。 監控條件 監控報告分為三種類型:「設定監控報告」、「自動控制項目」、「監控通知」設定監控報告 內的項目,可以監控機器人的各項軟硬體是否出現異常狀態。自動控制項目 則是可以在遠端主動控制機器人的各種設定值,讓機器人端不會被任意修改。監控通知 可以記錄機器人的操作狀態、異常狀態,並將監控的結果通知給收件人。 1、設定監控報告 連線狀態( 必選 )被監控裝置連線到遠端監控台的狀態,若發生異常,可能是裝置失去網路連線、關機中或發生其他異常。❊ 當失去連線時,遠端監控台即無法控制遠端的裝置。 硬體狀態被監控裝置的韌體與馬達狀態,監控硬體版本、關節馬達與底盤。 電量:可以檢視被監控裝置的電池電量,並設定電量低於多少數值時,會展示「中度異常」以及「高度異常」。勾選「機器人不在充電中時,以 TTS 進行提示」後,當檢查到機器人沒有插著充電線時,就會以 1 分鐘一次的頻率發出「請幫我充電線」的 TTS 提示。❊ 由於持續監控電量對機器人的讀取資料負擔非常大,所以在正常電量的狀況下,我們將會減少更新電量的資料讀取 監控中可使用的APP您可以設定套用此監控項目的機器人能執行哪些 App,也就是白名單機制。若畫面跳離指定的 App,將會收到系統的異常通知。也能進階使用自訂按鈕,遠端開啟指定的 App,讓機器人回去執行應有的工作任務。* 我沒有將 App 加入白名單,卻沒有異常提示?Roflow 是一套可以串連各種 App 為流程模組的工具,當執行 Roflow 專案時,可能會開啟其他輔助的 App 或因流程需要,暫時轉至其他工具上。因此在監控這個項目時,部分輔助 App 會自動被設定在白名單中,例如:機器人媒體播放器(媒體與工具模組用)、相機鏡頭(物件辨識模組用)等。 Kebbi 系列機器人專屬監控項目 騰空警示:當機器人被抬起、傾斜或倒地持續 1 分鐘以上,遠端監控台發出「高度異常」的警示。 Collibot 服務型系列機器人專屬監控項目 手推模式( 必選 ):機器人手推模式被開啟時,遠端監控台會展示此狀態,當機器人無法繼續執行工作或移動時,可以檢查是否因為沒有結束手推模式造成機器人被鎖定的狀態。 擴充機器人:開啟後,當監控到柯利堡與擴充的凱比機器人連線配對中斷時,將會以「擴充機器人未連線」於監控台發送異常提示 地圖定位:可以設定一張地圖作為機器人的白名單地圖,當機器人沒有開啟正確地圖、地圖遺失或定位有誤時,會對遠端監控台發送對應的錯誤狀態。 2、監控條件-自動控制項目 軟體更新排程:排程後可以讓您的機器人自動檢查是否有最新版本,並依照設定的時間進行更新。❊ 請注意,只有在機器人接上電源時才會進行更新,如在更新的時段內沒有接上電源,將會於下一次排程再次進行更新。 排程啟動:以星期或日為單位進行排程,設定在固定的時段自動開啟 App 或 Roflow 指定專案,搭配「待機階段」監控項目一同使用,可達成機器人休眠時間結束後,自動恢復工作模式的效果。▸ 自動開啟專案: 如果排程開啟的是 Roflow 專案,可以勾選檢查到機器人沒有在排程內開啟此專案時就自動重新啟動。▸ 設定注意事項:勾選自動重新啟動後機器人端就無法任意結束專案,直到修改監控條件。排程不可與待機與排程更新時段重疊。當排程中發生每天與每週的時段衝突時,會優先執行每週的排程。以下圖設定為例: ▸ 每天 14:00 – 20:30 要開啟 AppA,但每週二 14:00-17:00 要改開啟 AppB▸ 週二 17:01 週二的排程結束了,因為每天 14:00 – 20:30 的排程還在時間內,需要排程開啟一次 AppA 音量大小開啟監控後,機器人的音量大小將固定在遠端設定的數值,無法在機器人端隨意被調整。 螢幕亮度開啟監控後,機器人的螢幕亮度將固定在遠端設定的數值,無法在機器人端隨意被調整。 Kebbi 系列機器人專屬監控項目 待機階段:可以選擇「機器人在任何時候都不進入休眠狀態」,讓機器人閒置時不會主動進入休眠狀態, 或對機器人的勿擾時間進行排程,機器人便會在您設定的休眠時間進入勿擾模式,就此延長電池壽命,減少耗電量。 *使用者手動點擊機器人 Home 鍵進入的「勿擾模式」不在此控制內。 隱藏異常提示:當機器人有異常時,主動隱藏螢幕上的提示,僅在遠端監控台展示「中度異常」。這些異常狀態基本上屬於硬體的異常,如果您的工作需求對馬達或底盤的依賴程度較低,只要螢幕及軟體持續運作,您就可以選擇「隱藏異常提示」,以維持機器人畫面正確運作。啟用該監控條件後,被監控裝置將隱藏以下異常提示:機器人馬達異常機器人韌體異常機器人關節異常機器人底盤異常機器人騰空警示* Collibot 服務型機器人的硬體異常狀態發生時,為了確保場域的安全性,機器人會立即停止任務,因此服務型機器人的異常狀態將無法被隱藏。 系統通知與推播設定:開啟監控後,可以控制機器人的「系統通知」與「推播」視窗是否關閉,設定後將無法在機器人端調整。 ・系統通知為機器人螢幕頂端的橫幅視窗,主要通知有成就解鎖、檔案派發、系統通知等。 ・推播訊息由女媧發出的最新消息通知,例如機器人功能推薦或活動通知。 馬達鎖定:開啟監控後,機器人的各項馬達數值將固定在遠端設定的數值,無法在機器人端隨意被調整。 自主行為:開啟監控後,可以控制機器人自主行為內的各項設定,固定在遠端設定的數值,無法在機器人端隨意被調整。 Collibot 服務型系列機器人專屬監控項目 移動控制:開啟監控後,可主動控制機器人馬達移動,設定後無法在機器人端隨意被調整。 監控條件-監控通知 當發生高度異常的情況,監控台會主動寄 Email 給收件人,最多可新增 20 位收件人。 系統信會依照您「女媧帳戶-管理帳戶」設定的「語言偏好」的設定作為寄送的語言 異常狀態檢視 您可以從監控清單中的「異常狀態燈號」,或直接從文字訊息中查看裝置目前的執行狀況。 排錯手段 可以從監控清單檢視裝置是否有異常狀態。如發現裝置有異常狀態,可以從遠端進行錯誤排除。以下為可進行排錯的項目: Kebbi 系列機器人異常狀態 燈號顯示 狀態類型 狀態說明 🟢 狀態正常 恢復正常運作 🟡 中度異常 硬體版本異常硬體底盤異常硬體關節異常硬體異常 - 電量過低:請將機器人插上充電線,將電量提升至自訂異常提示的數值 🔴 高度異常 設定的 App 跳離:現場人工操作或設定開啟按鈕。找不到 App:現場人工操作或設定開啟按鈕。找不到 Roflow 專案:現場人工操作或設定開啟按鈕。硬體版本異常:清空周圍環境, 聯絡您服務提供商送維修。硬體底盤異常:清空周圍環境, 聯絡您服務提供商送維修。硬體關節異常:清空周圍環境, 聯絡您服務提供商送維修。硬體異常:清空周圍環境, 聯絡您服務提供商送維修。騰空警示:請確認機器人是否傾倒,或被抬起 🟣 嚴重異常 失去連線:裝置與遠端監控台RMS 登出:機器人端「檔案管理」App 被登出,導致與雲端 RMS 失去連線 Collibot 服務型系列機器人 燈號顯示 狀態類型 狀態說明 🟢 狀態正常 恢復正常運作 🟡 中度異常 硬體版本異常硬體異常電量過低:請將機器人插上充電線,將電量提升至自訂異常提示的數值未充電:請現場人員協助排除障礙擴充機器人未連線:請現場人員先檢查擴充機器人是否與機器人連接,並確認 wifi 是否連線到餐車手推模式:請現場人員將手推模式關閉後,機器人才能繼續執行任務。 🔴 高度異常 設定的 App 跳離:現場人工操作或設定開啟按鈕。找不到 App:現場人工操作或設定開啟按鈕。找不到 Roflow 專案:現場人工操作或設定開啟按鈕。硬體版本異常:清空周圍環境, 聯絡您服務提供商送維修。硬體異常:清空周圍環境, 聯絡您服務提供商送維修。電量過低:請將機器人插上充電線,將電量提升至自訂異常提示的數值電池異常:請現場人員協助確認緊急開關是否開啟,若緊急開關已關閉仍有異常請聯絡原廠 底車馬達異常:請重新開機,仍有異常請聯絡代理商。定位異常:請現場人員協助排除障礙,仍有異常請聯絡代理商。找不到充電座:請確認套用的地圖中是否有充電點座標,或直接將機器人推至充電座,仍有異常請聯絡代理商。開啟錯誤地圖:請確認是否開啟正確地圖,仍有異常請聯絡代理商。找不到地圖:請聯絡代理商協助處理。 🟣 嚴重異常 失去連線:裝置與遠端監控台RMS 登出:機器人端「檔案管理」App 被登出,導致與雲端 RMS 失去連線底車連線異常:請重新開機,仍有異常請聯絡代理商。 當出現異常狀態時,名單上會整裡出所有被監控中的裝置異常的類型與數量,點擊單一異常狀態可以篩選出對應狀態的機器人。 排錯手段 可以從監控清單檢視裝置是否有異常狀態。如發現裝置有異常狀態,可以從遠端進行錯誤排除。 以下為可進行排錯的項目: 基礎設定:停止監控:停止監控該裝置。設定監控條件:為該裝置套用或設定其他監控條件。 修復動作:重新開機:將該裝置重新開機。隱藏機器人端提示(Kebbi):將機器人端的錯誤提示隱藏,避免機器人影響工作。可於遠端監控台檢視被監控裝置的異常狀態,當被監控裝置重新開機後狀態若未恢復,將會再次展示。 *隱藏後,異常狀態可以從機器人端的下拉選單檢查修復韌體:將裝置更新到最新的韌體版本。更新軟體:將裝置更新到最新的軟體版本。開啟<按鈕名稱>:可自訂一鍵開啟 App 的按鈕,點擊後就會發送開啟的指令至裝置。開啟地圖精靈(Collibot):開啟地圖精靈,檢視機器人正在執行的地圖開啟超級服務生(Collibot):開啟超級服務生 App 檢測:網路連線品質:可以針對單台或多台機器人進行網路品質檢測,可藉此了解機器人所在環境的網路狀況。上傳系統報告:上傳機器人的錯誤報告至女媧伺服器,由女媧客服協助排除錯誤。螢幕截圖:擷取該裝置目前的螢幕畫面,用於檢查裝置是否執行正確的任務。輸出狀態:即時檢視機器人目前音量、螢幕亮度與馬達動作的數值。移動狀態(Collibot):檢視機器人目前在使用的地圖上的哪一個位置。 裝置工作記錄 可以檢視近 14 天機器人的異常或操作記錄,記錄項目包含異常狀態、團隊成員進行人工操作或變更設定。 異常狀態 同上 人工與自動操作紀錄類型 操作類型 記錄類型 項目 人為操作 工作記錄 重新開機隱藏機器人端提示更換監控條件上傳系統報告停止監控裝置開啟 <按鈕名稱>網路品質檢測 <檢測結果> 系統行為 自動更新或服務重啟 更新版本 - 成功更新版本 - 無可用更新更新版本 - 失敗女媧雲端服務定時重啟 ← 上一篇:派發 App 與檔案 前往閱讀:操作紀錄